Advanced Clover
CopterHack-2021, team FTL. Контакты: @maximmasterr в Telegram.
Как-то раз устав выполнять некоторые действия с Клевером мы решили их упростить, и так появился проект advancedClover, которой включает в себя следующие элементы:
- IDE
- VSCode-like IDE в браузере
- Интегрированный файловый менеджер
- Интегрированный терминал
- Автокомплит
- Возможность просмотра топиков
- Возможность просмотра топиков с изображениями
- Возможность вызова сервисов
- Возможность просмотра статуса коптера
- Библиотека для Python
- Упрощение работы с навигацией
- Упрощение работы с камерой
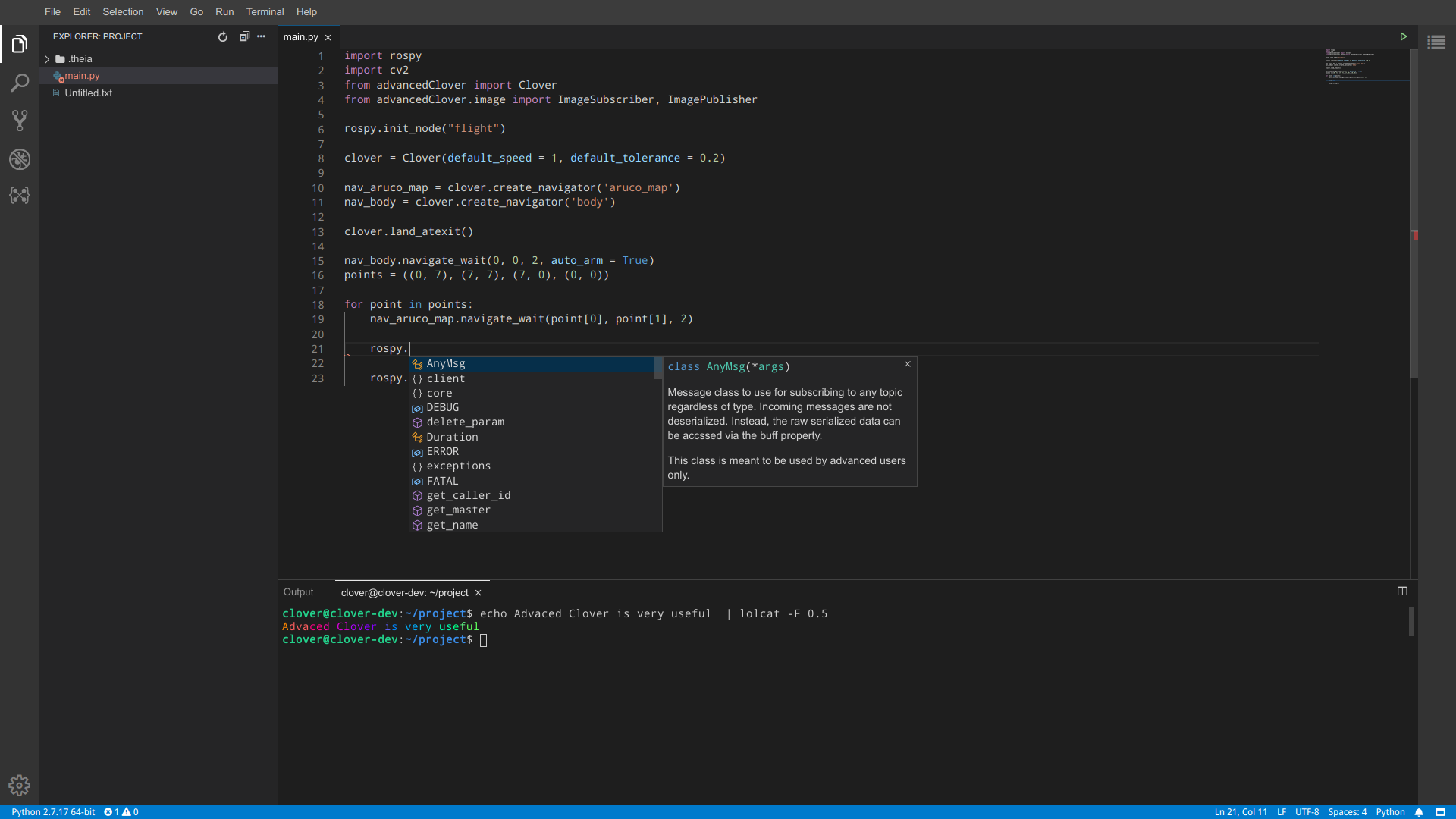
Пример автокомплита, терминала и файлового менеджера:
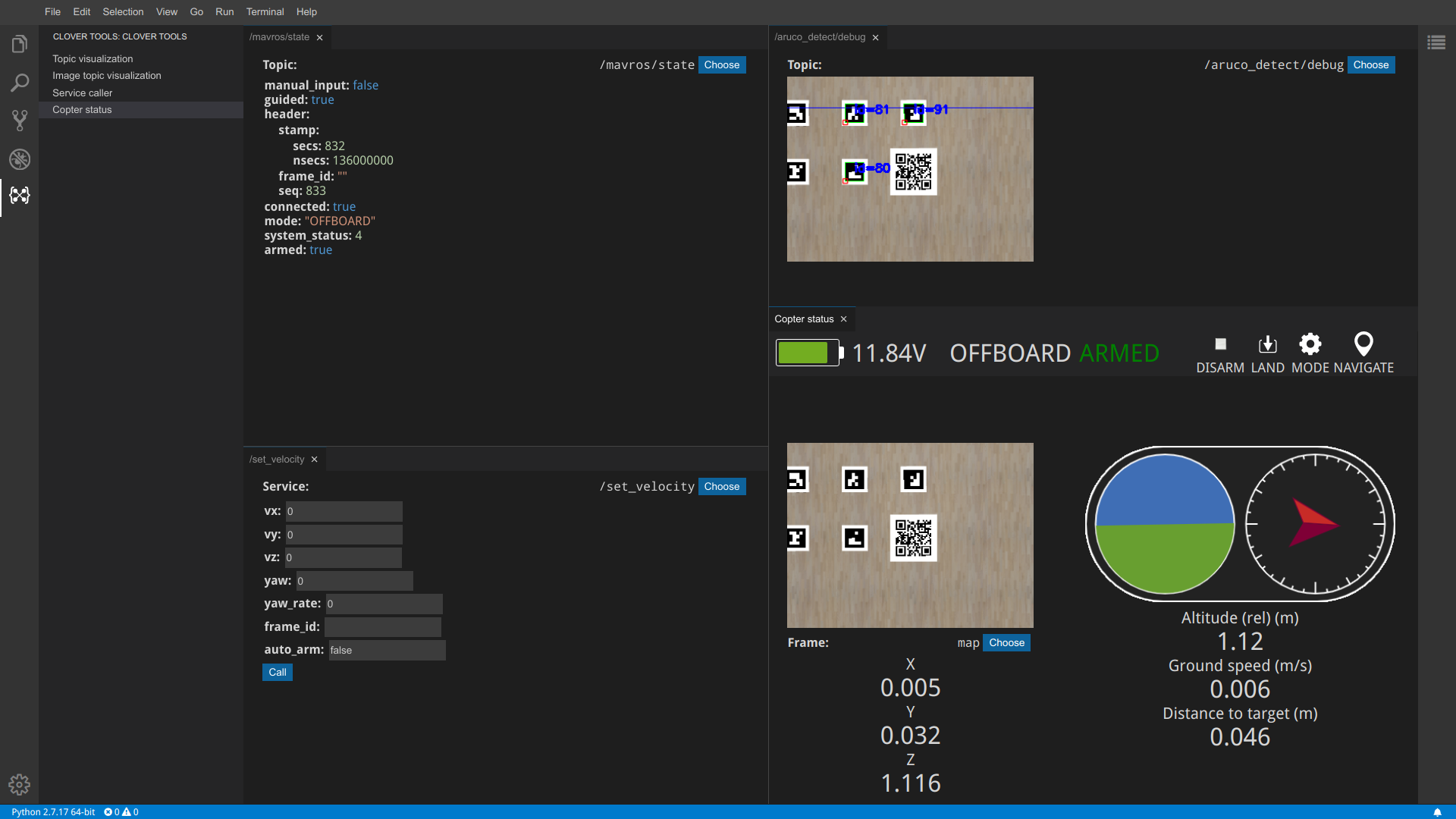
Пример инструментов ROS и Copter Status:
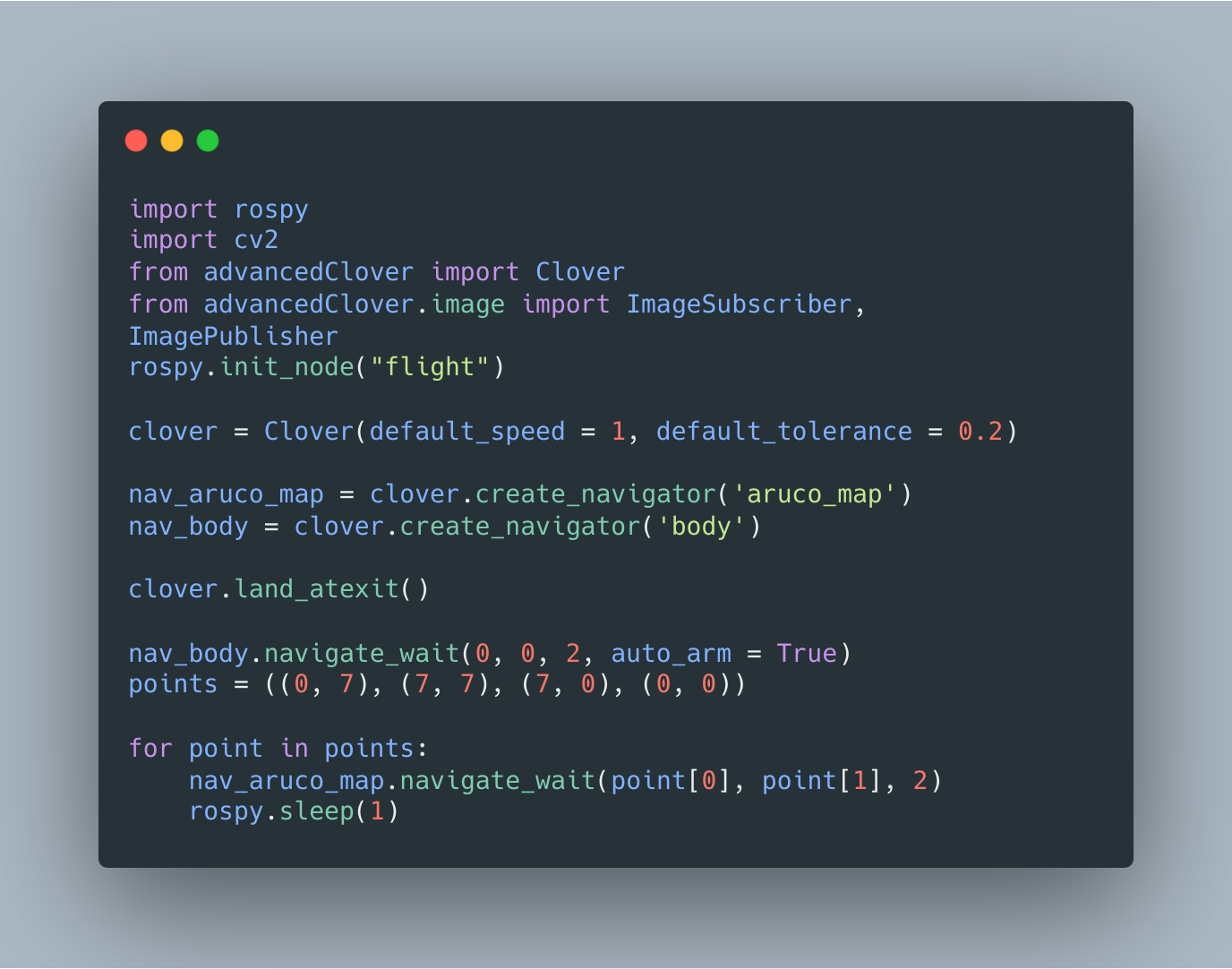
Пример полёта по квадрату с использованием advancedClover:
Более подробно об установке и использовании advancedClover можно почитать здесь.
Технические подробности
Итак, что у нас внутри:
- Theia прикольная web IDE которая очень похожа на VSCode и во многом даже лучше его.
- Расширения для vscode (работает и в theia), предоставляющее инструменты ROS.
- Питоновская библиотек, на самом деле это просто примеры из документации вынесенные в классы.
- Документация на docsify (gitbook слишком усложнён).
- Сборка на GitHub actions.
На самом деле интерес представляет только расширение, но я расскажу о всех частях.
IDE
Изначально мы использовали code-server, но он слишком долго собирался и был монолитен, поэтому мы перешли на theia которая менее монолитна и собирается намного быстрее, однако её пришлось допилить:
- Theia по дефолту тянет с собой около 1гб
node_modulesчто не очень хорошо, так что мы добавили сборку в один бинарник с помощью pkg, однако необходимо патчик код генерируемый при build перед упаковкой в бинарник с помощью патча. - Несмотря на то что по сравнению с code-server сборка занимала раза в три меньше времени, её пришлось ещё немного распараллелить вынеся скачивание плагинов/расширений в отдельный job на GitHub actions.
- Благодаря стараниям тех людей кто пишет web-стандарты theia нормально работает либо на HTTPS, либо на localhost, по этому мы написали специальную программку на golang которая на лету генерирует сертификат, подписывает его корневым (который установил пользователь), и им по нему отправляет HTTPS.
Расширение
Вот здесь самое интересное, расширение написано на TypeScript, собирается с помощью webpack и использует react, roslibjs и OpenCV.
ROSLIB.js
Для коммуникации с ROS используется библиотека roslib.js, у неё есть некоторые особенности:
- Так как мы используем строго (ну почти) типизированный TypeScript нам нужен типизированный ROS, типизация по дефолту лежит в DefinitelyTyped, но она там немного кривая, поэтому лучше создать файл roslib.d.ts который будет содержать типизацию для roslibjs и в случае если она не совпадает исправлять её.
- Roslib использует колбэки а они очень неудобные, поэтому мы промисифицировали функции roslib. Здесь.
- Потом была написана обёртка для roslib которая ещё немного упростила работу с сервисами и топиками.
- И ещё мы написали хуки для реакта что бы ещё немного упростить работу.
- ROS умеет кодировать сообщения в cbot или в json, json не умеет принимать 64-битные числа (они становятся неточными) и занимает больше места, а cbor из-за кривой реализации не может отправлять массивы сообщений но зато меньше по размеру и умеет в 64-bit.
- Чтобы декодировать MAVLink нужно получать массив из 64 битных чисел, в js они называются BigInt, однако roslib когда видит 64 битное число обрезает его, поэтому мы написали замену модулю roslib, замена применяется вебпаком.
Рендеринг картинок
Изначально мы использовали web video server для отображения картинок, однако он немного плохо работал и мы переписали рендеринг картинок на OpenCV, и тут кроется несколько подвохов:
- Загрузка OpenCV происходит асинхронно повлиять на это никак нельзя, самым простым решением оказалось использование экспериментальной штуки в webpack под названием top-level async, мы написали простой модуль который загружает OpenCV, и когда мы хотим использовать OpenCV мы импортируем этот модуль и вызываем в top-level асинхронную функцию которая загружает OpenCV.
- Так как картинки весят много и слать их закодированными в base64 не очень удобно, мы для получения картинок используем CBOR
- В ROS картинки могут приходить в разных форматах по этому мы написали функцию которая конвертирует их в RGB. В общем можно посмотреть как это делается здесь.
И ещё чуть чуть веселья
- Не всё что можно узнать от контроллера публикуется в mavros поэтому надо парсить MAVLink, для этого юзаем кодирование cbor и затем вытягиваем данные на основе данных отсюда.
- TF2 в roslib не очень удобен, по этому чтобы получить позицию коптера нужно запрашивать фрэйм
mapи смотреть трансформации относительно его (не забывайте их инвертировать).
Библиотека для питона
Является в основном просто красиво оформленным кодом написанным в примерах кода из документации Клевера, однако есть интересный момент с получением картинки, он в отличие от стандартного возвращает последнюю полученную картинку предоставляя API похожий на VideoCapture, более подробно можно посмотреть здесь.
Сборка и Документация
Документация написана на markdown, рендерится с помощью docsify (ибо gitbook слишком переусложнён).
Проект собирается на GitHub actions, сборка максимально распаралелена.