Innopolis Open 2020 - команда L22_ÆRO
Команда
Описание задачи финала
Внедрение новых технологий происходит в различных отраслях экономики, в том числе и в сельском хозяйстве. Дроны или БПЛА не стали исключением. Благодаря применению беспилотников оценка состояния сельскохозяйственных территорий и анализ компонентов ландшафта стали более доступными и эффективными.

Финальная задача Innopolis Open 2020 была посвящена мониторингу сельскохозяйственных территорий и состояла из следующих элементов:
- Взлет (с QR-кода) и посадка (на цветной маркер небольшого размера).
- Распознавание зашифрованного сообщения в QR-коде.
- Распознавание цвета объектов (цветных маркеров – условное обозначение сельхоз угодий).
- Определение их координат (расположение на поле изменяется).
- Отчет по полученным данным.
Код
Код на GitHub: https://github.com/vas0x59/ior2020_uav_L22_AERO.
Основной код
При реализации кода в первоначальной концепции использовались свои типы сообщений, множество нод и других возможностей ROS, для обеспечения этого функционала необходимо создавать пакет и компилировать его, но из-за специфики соревнований (использование одной SD-карты для все команд) весь код был объединен в один файл. Данный подход усложнил отладку, но упростил запуск на площадке.
Элементы программы:
- Взлет.
- Распознавание QR-кода.
- Поиск цветных маркеров.
- Посадка.
- Генерация отчета и видео.
Итоговыми координатами маркеров являются автоматически сгруппированные и усредненные данные из системы распознавания полученных за весь полет. Для покрытия всей территории была выбрана траектория "Зиг-заг". Для отладки применен симулятор Gazebo.
Цветные маркеры
l22_aero_vision/src/color_r_c.py
Для обработки изображения с камеры и детектирования объектов мы использовали функции из библиотеки OpenCV.
Алгоритм:
- Получение изображения и параметров камеры.
- Построение маски по определенному диапазону цветов (в формате HSV).
- Детектирование контуров цветных объектов.
- Определение типа объекта, получение ключевых точек объекта на изображении.
- Определение положения квадратов и кругов с помощью solvePnP основываясь на реальных размерах объектов и точках на изображении (OpenCV Docs).
- Отправка результата в топики
/l22_aero_color/markersи/l22_aero_color/circles(координаты относительноmain_camera_optical).
Во время разработки были созданы свои типы сообщений, а также сервис для настройки параметров детектора во время посадки. (ColorMarker, ColorMarkerArray, SetParameters).
Для определения положения цветных объектов в системе координат поля была использована библиотека TF (http://wiki.ros.org/tf)
Из-за искажений по краям изображения от fisheye-объектива все распознанные контуры находящийся рядом с краем изображения игнорируются. Во время посадки данный фильтр отключается. Определение типа объекта производиться с помощью функций анализа контуров (approxPolyDP - кол-во вершин; minAreaRect, contourArea - соотношение площади описанного квадрата и площади контура + соотношение сторон).
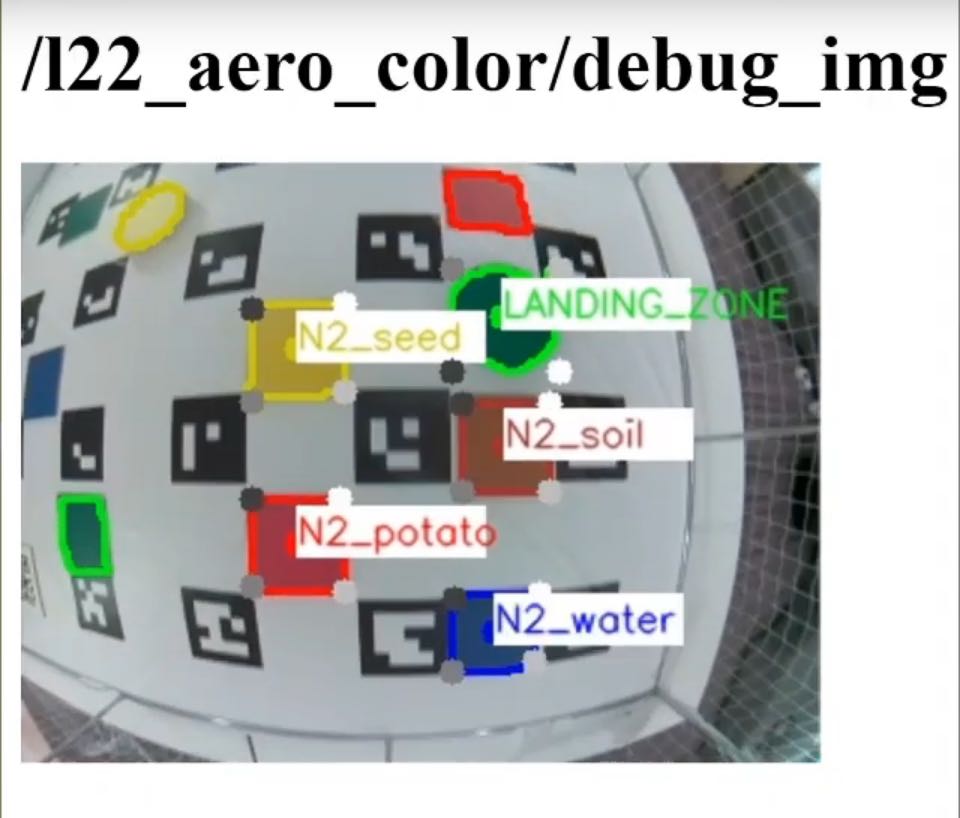
Примеры распознавание маркеров:
Визуализация в RViz
l22_aero_vision/src/viz.py
Для отладки распознавания объектов создан скрипт визуализирующий координаты маркеров в среде RViz.
QR-код

Для выполнения задачи распознавания QR-кода была использована библиотека PyZbar. С целью повышения результативности и точности распознавания QR-кода полеты производились на небольшой высоте по точкам, расположенным вокруг данного объекта.
Посадка
Посадка выполняется в 3 этапа:
- Перелет к предполагаемой зоне посадки и зависание на высоте 1.5 м.
- Спуск до высоты в 0.85 м с 3 корректировками по координатам маркера относительно
aruco_map. - Спуск в течение нескольких секунд с постоянной корректировкой по координатам маркера посадки в системе координат
body(так как ArUco-маркеры могут быть уже не видны), вместоnavigateиспользуетсяset_position.
Gazebo
По причине отсутствия возможности тестирования кода на своем реальном дроне было принято решение воспользоваться симулятором Gazebo.
Для запуска пакета ПО Клевера в симуляторе можно использовать набор скриптов или оригинальную инструкцию от PX4.
Для Innopolis Open было создано несколько тестовых сцен. ior2020_uav_L22_AERO_sim.
Также использование симулятора ускорило отладку полного выполнения кода, так как запуск производился с real time factor=2.5.
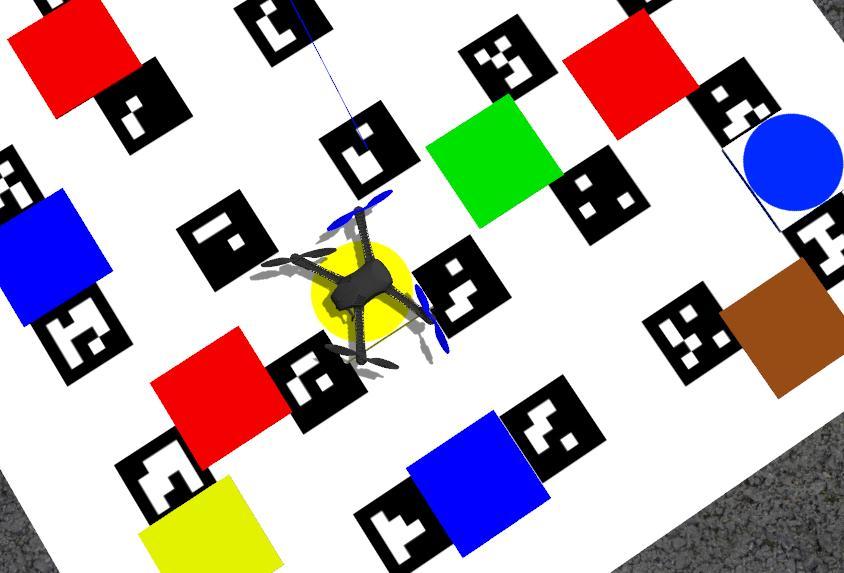

При тестировании выявлены некоторые проблемы (некорректное положение aruco_map) с использованием дисторсии в плагине камеры, поэтому в симуляторе использовалась камера типа Pinhole (без искажений от объектива).
ROS
Созданные ноды, топики, сообщения и сервисы.
Nodes
l22_aero_vision/color_r_c.py- распознавание цветных объектов.l22_aero_vision/viz.py- визуализация в RViz.l22_aero_code/full_task.py- основной код.
Topics
/l22_aero_color/markers(l22_aero_vision/ColorMarkerArray) - список прямоугольных маркеров./l22_aero_color/circles(l22_aero_vision/ColorMarkerArray) - список круглых маркеров./l22_aero_color/debug_img(sensor_msgs/Image) - изображение для отладки./qr_debug(sensor_msgs/Image) - изображение для отладки.
Messages
ColorMarker
string color
int16 cx_img
int16 cy_img
float32 cx_cam
float32 cy_cam
float32 cz_cam
float32 size1
float32 size2
int16 type
ColorMarkerArray
std_msgs/Header header
l22_aero_vision/ColorMarker[] markers
Services
SetParameters
float32 rect_s1
float32 rect_s2
float32 circle_r
int32 obj_s_th
int32 offset_w
int32 offset_h
---