Сборка Клевера 4.2 Pro
Размер крепежа
Во время сборки используются винты и стойки различных размеров, использование крепежа не соответствующего размера может повредить коптер.
 |
Винт M3x10 |  |
Стойка алюминиевая 40 мм |
 |
Винт M3x8 |  |
Стойка алюминиевая 15 мм |
| Винт M3x5 |  |
Стойка нейлоновая 40 мм | |
| Саморез M2x5 |  |
Стойка нейлоновая 30 мм | |
| Гайка M3 (самоконтрящаяся) |  |
Стойка нейлоновая 20 мм | |
| Гайка M3 (нейлоновая) |  |
Стойка нейлоновая 15 мм | |
 |
Стойка демпферная |  |
Стойка нейлоновая 6 мм |
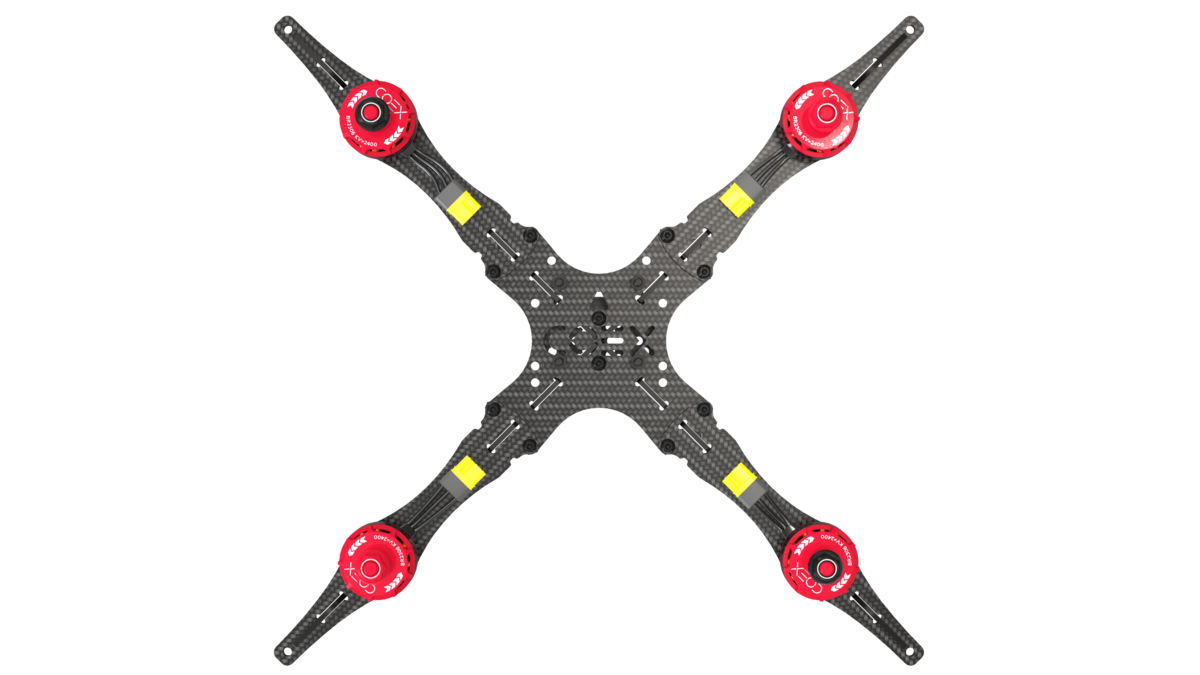
Сборка рамы
Совместите 4 луча с центральной декой, зафиксируйте их при помощи винтов М3х8 и гаек с нейлоновой вставкой.

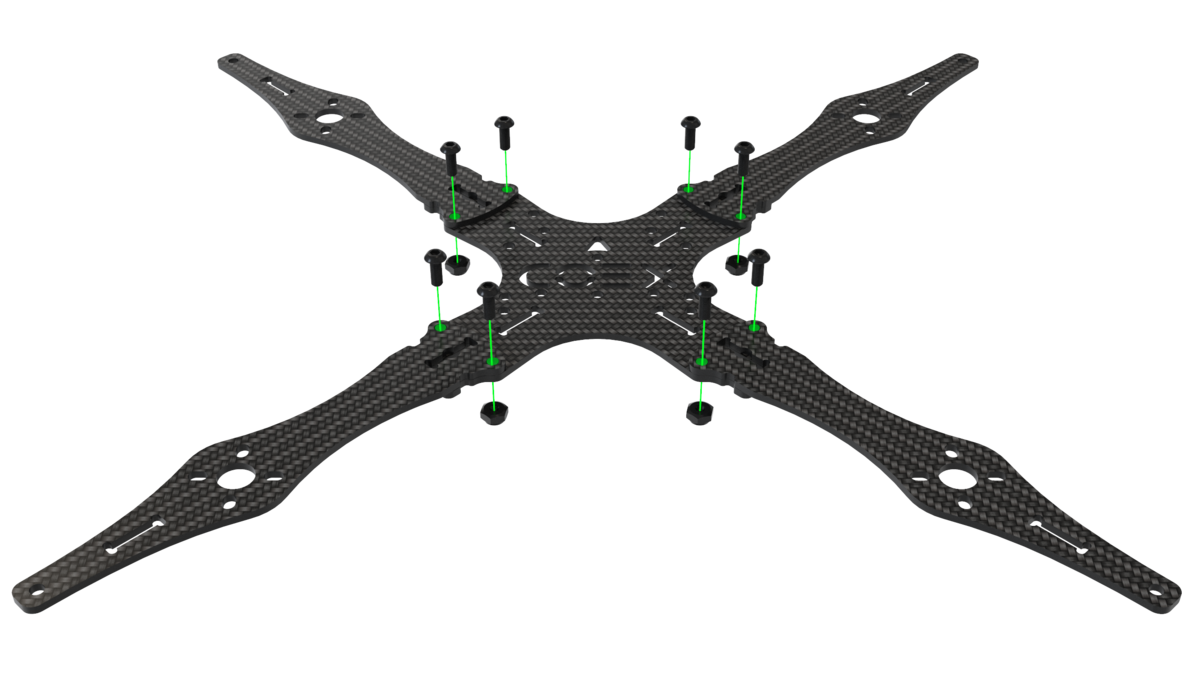
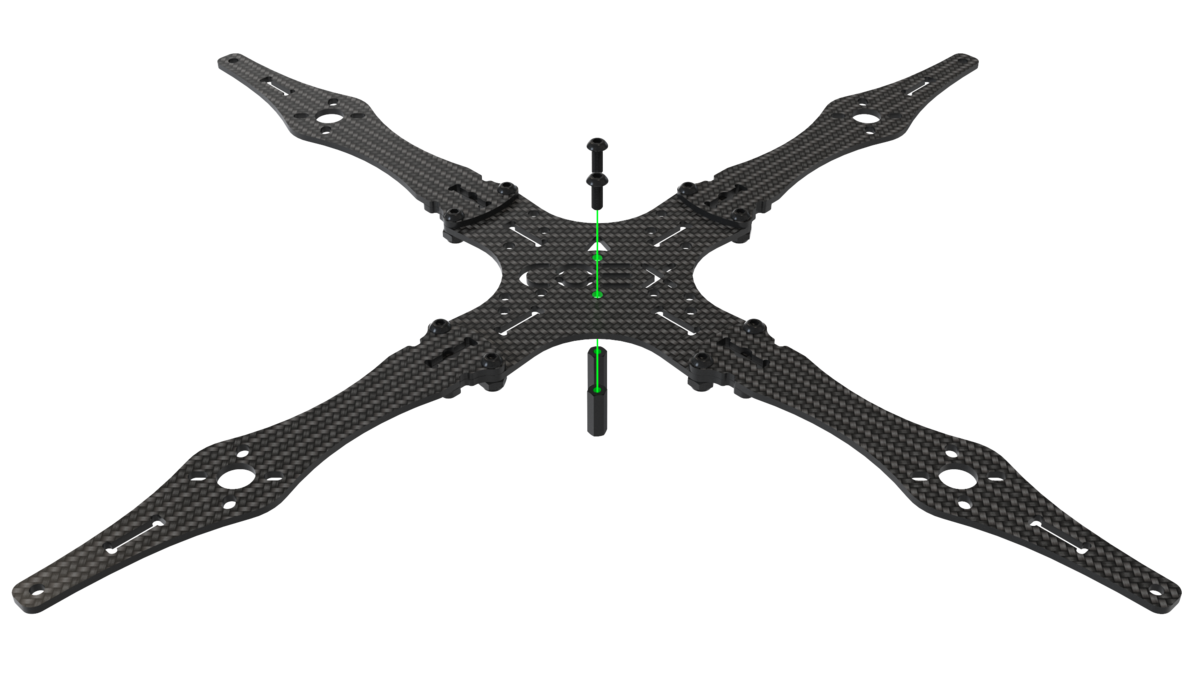
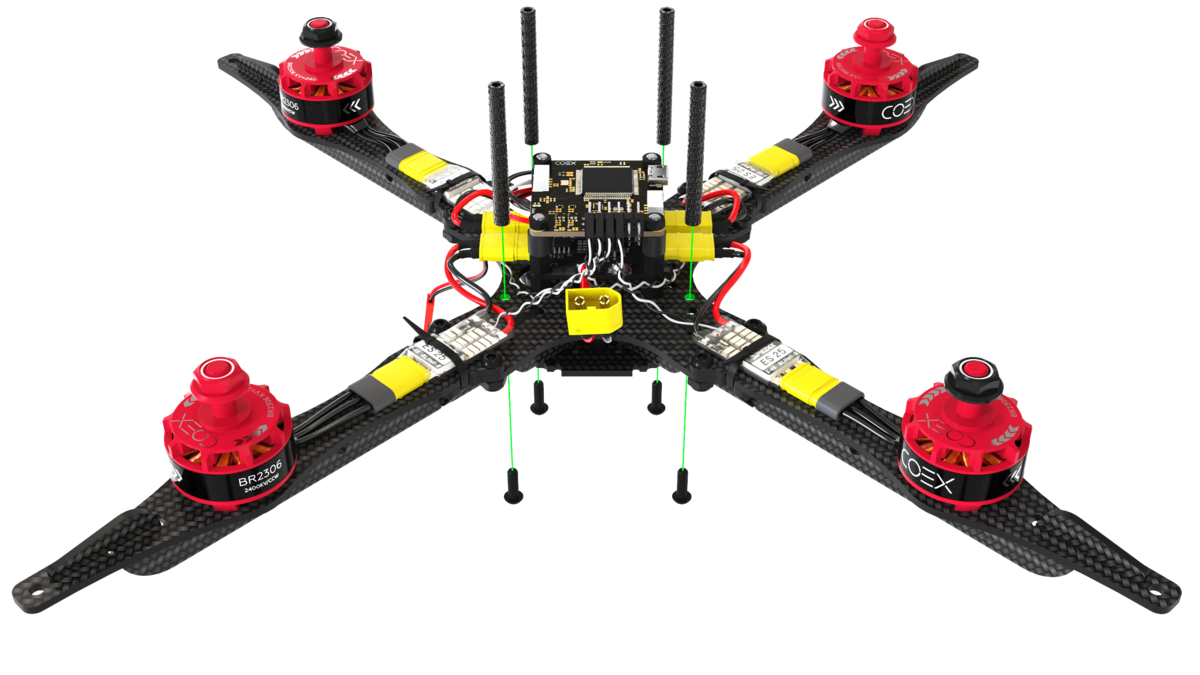
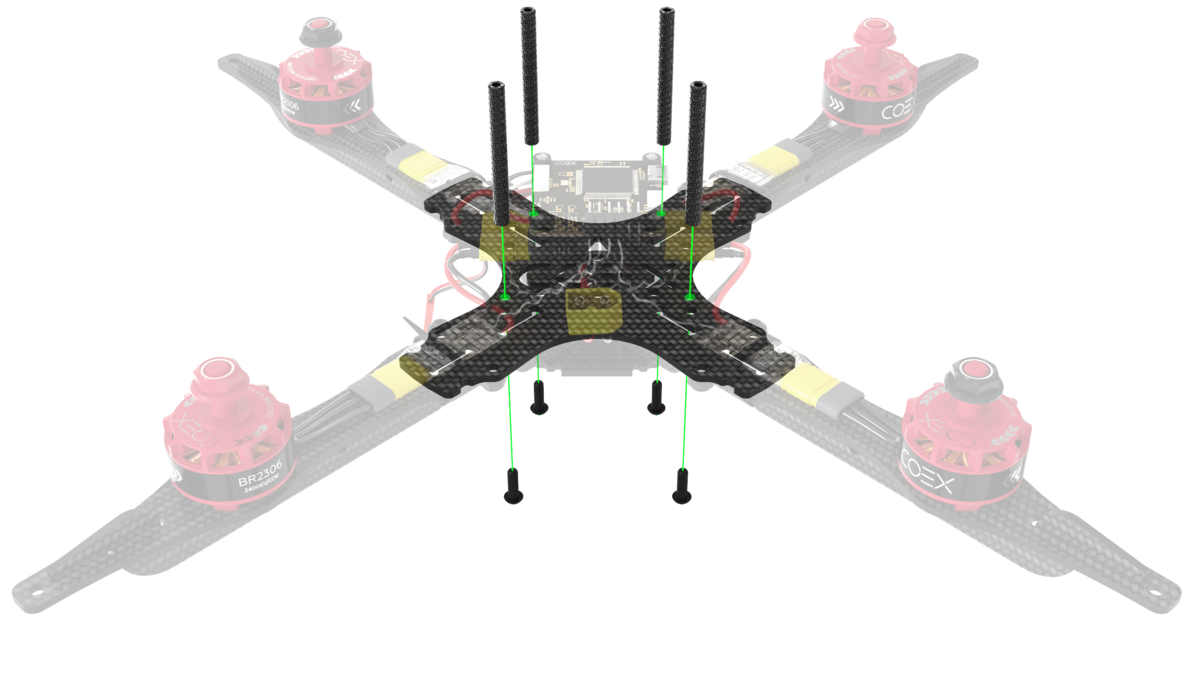
На центральные отверстия в главной деке установите 2 стойки 15 мм и закрепите их с помощью винтов М3х8.
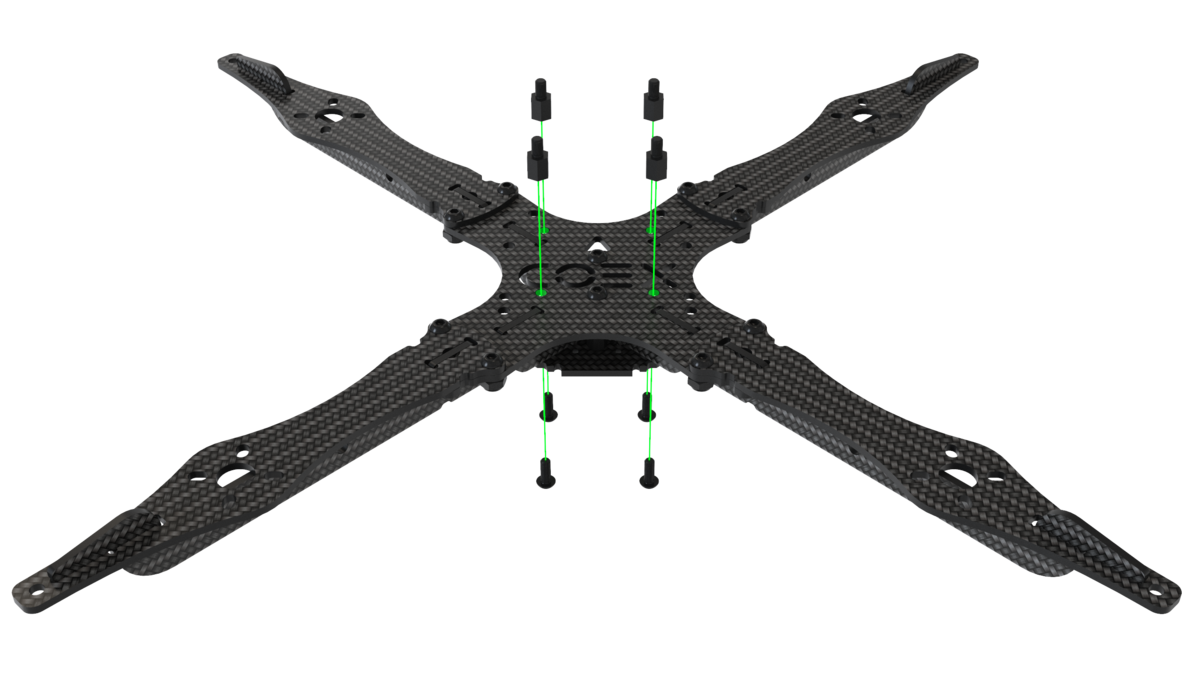
Установите крючок пластины жесткости в паз на луче.
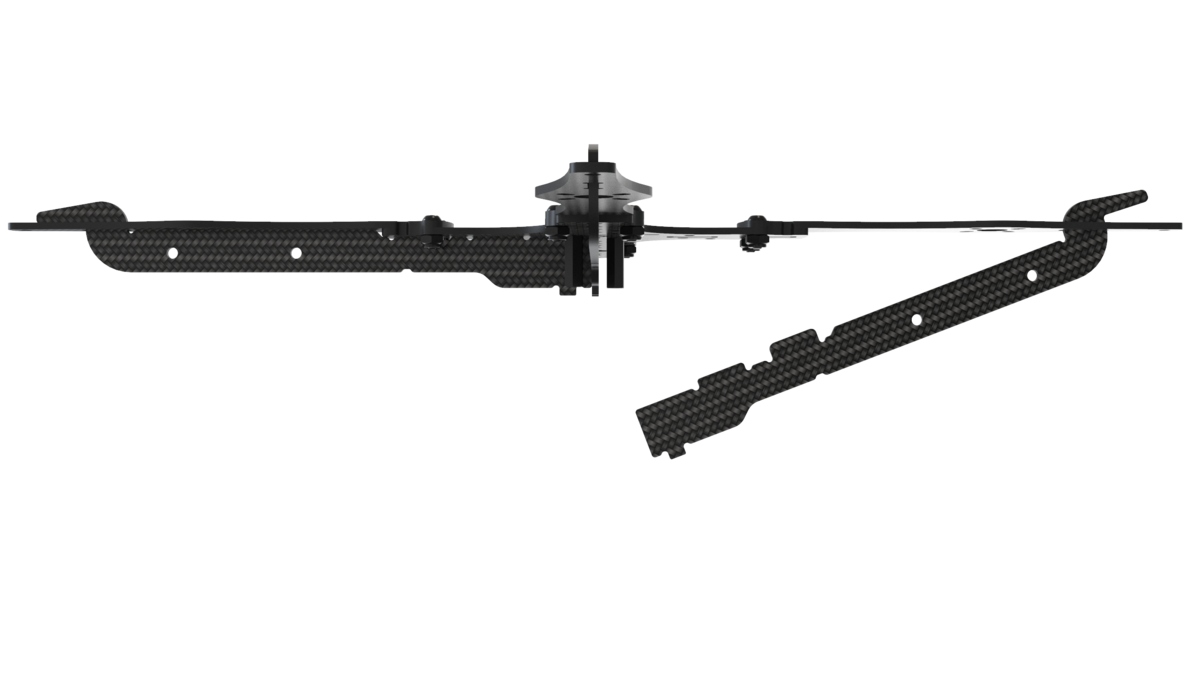
Прижмите пластины жесткости к главной деке.

Стяните пластины жесткости с помощью малой карбоновой деки.
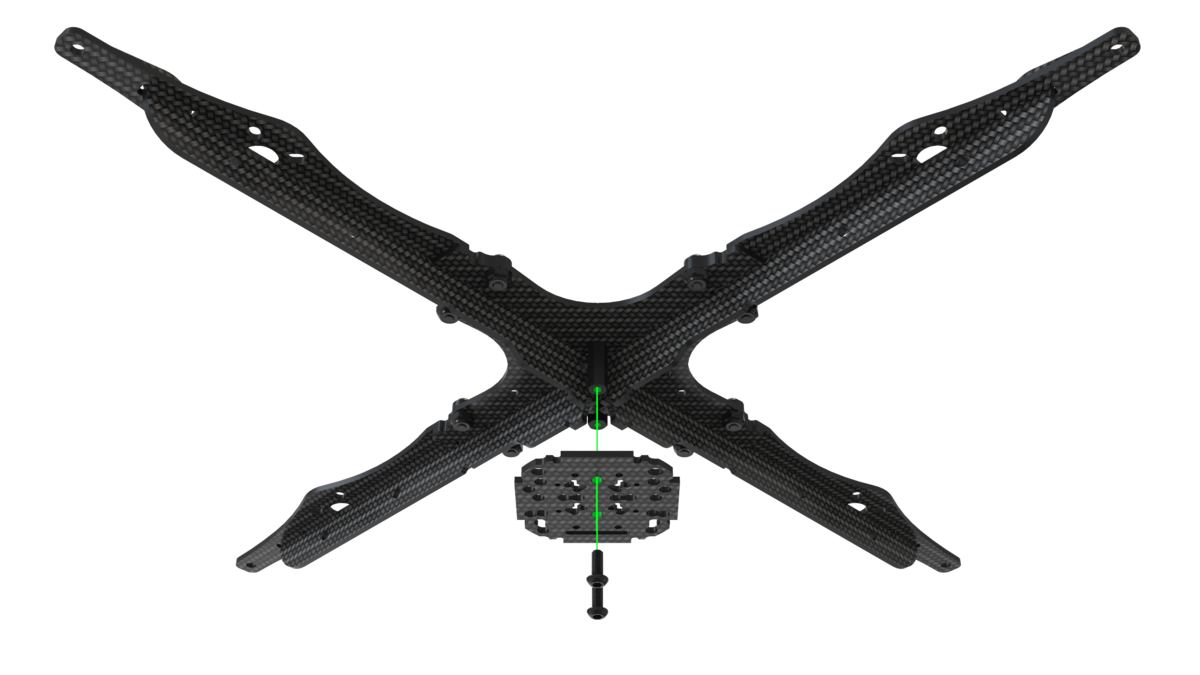
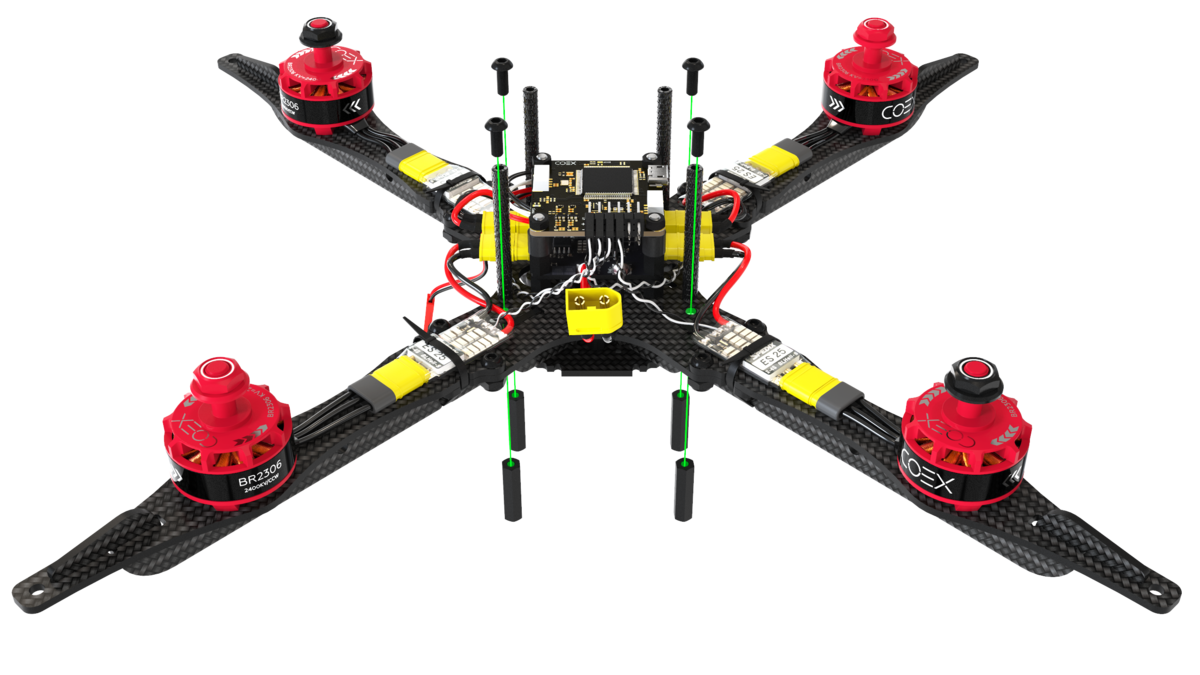
Установите 4 нейлоновые стойки 6 мм и закрепите их с помощью винтов М3х5.
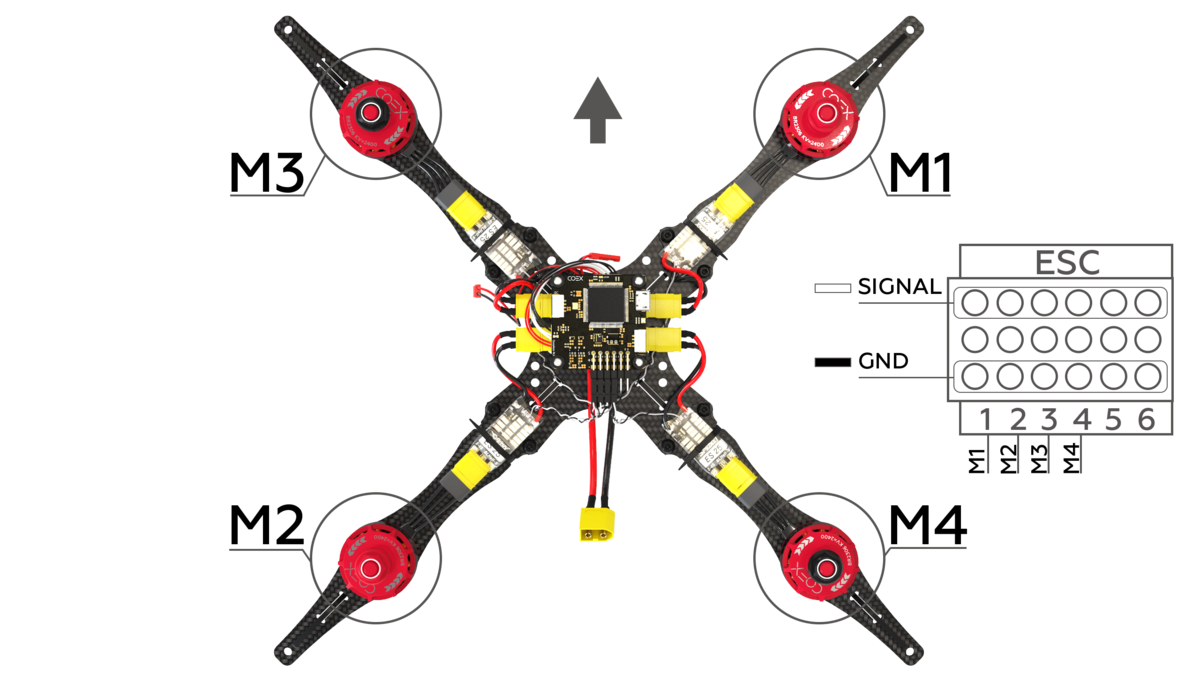
Установка моторов
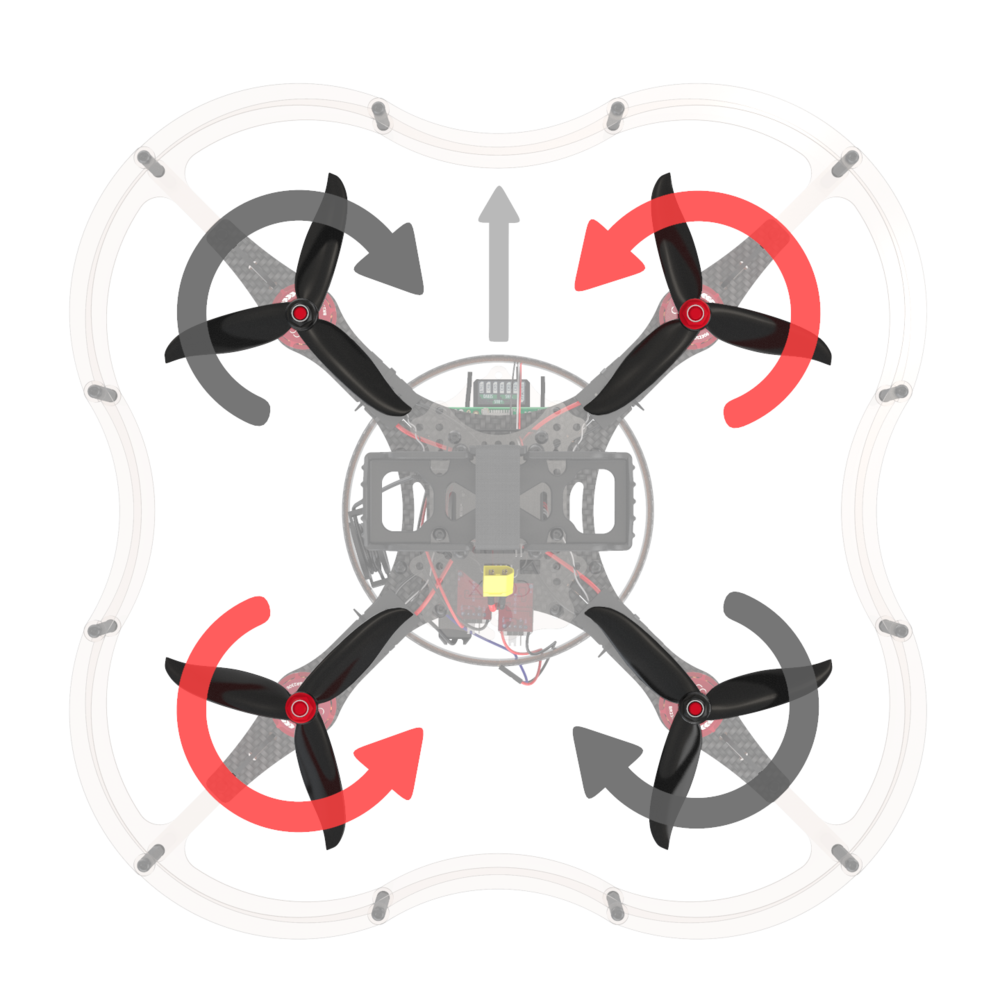
При установке моторов обратите внимание на схему вращения моторов. Маркировка вращения на моторах должна совпадать со схемой вращения.
Установите мотор на соответствующие отверстия в луче с помощью винтов М3х5.
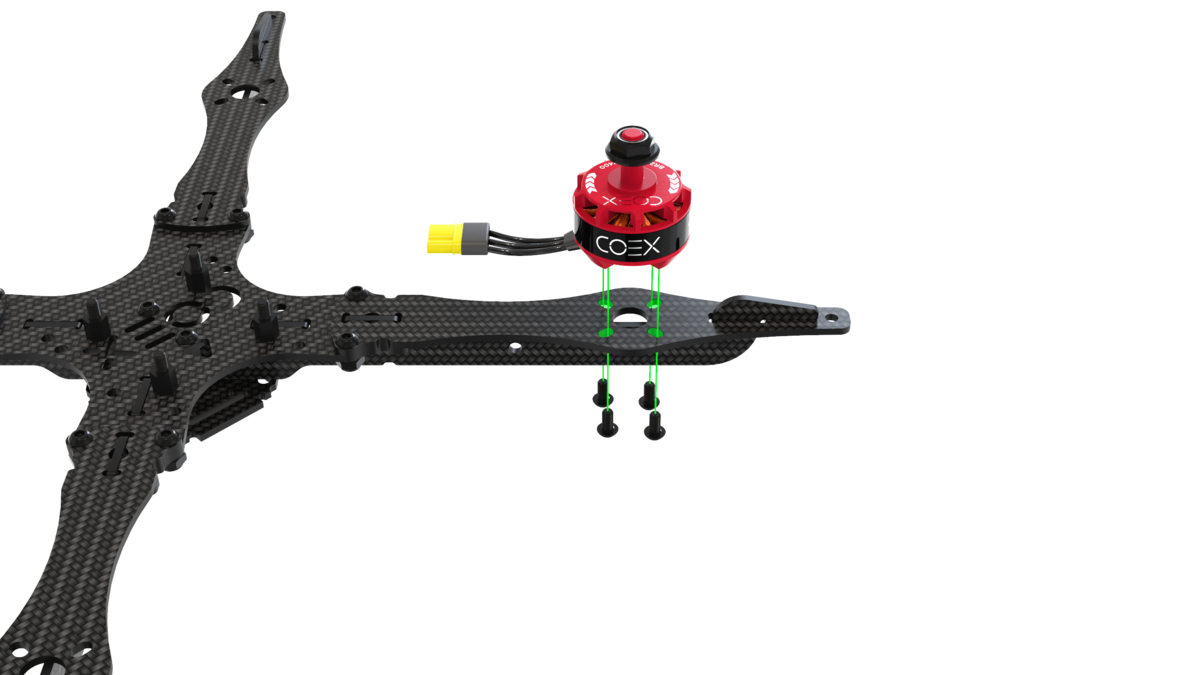
Убедитесь, что моторы закреплены с помощью винтов М3х5, в противном случае может возникнуть короткое замыкание между обмотками.
Установка ESC и PDB
Подсоедините к моторам регуляторы оборотов (ESC) с помощью разъемов MR30 и закрепите их на лучах с помощью хомутов.

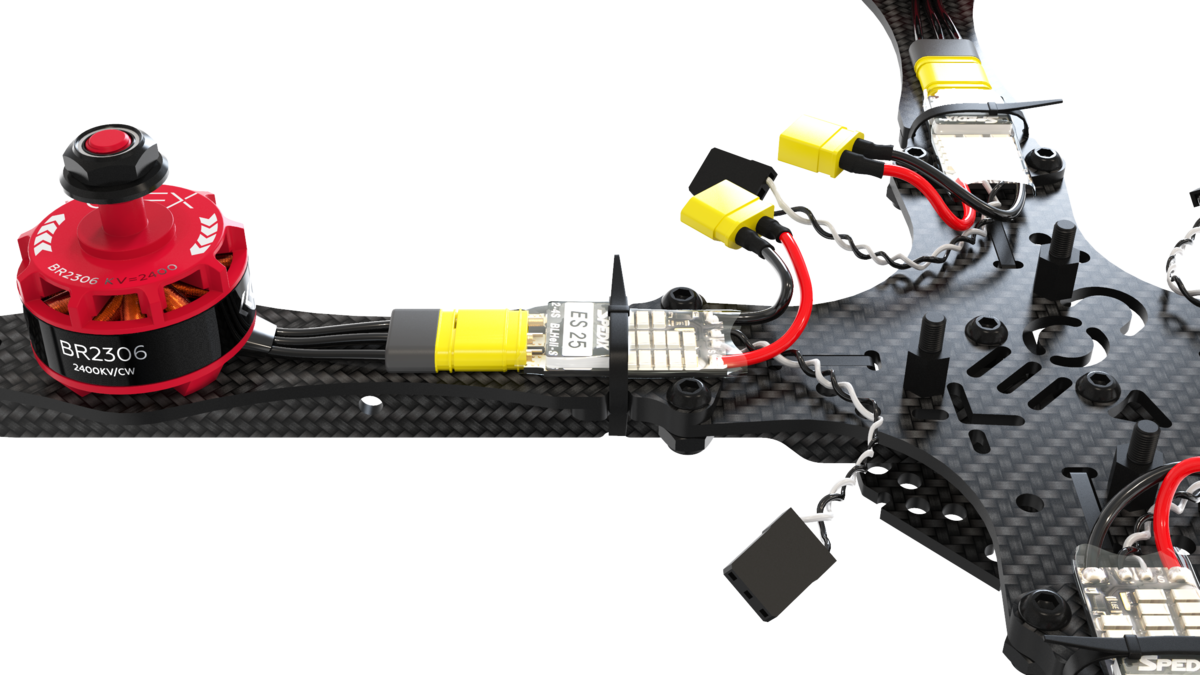
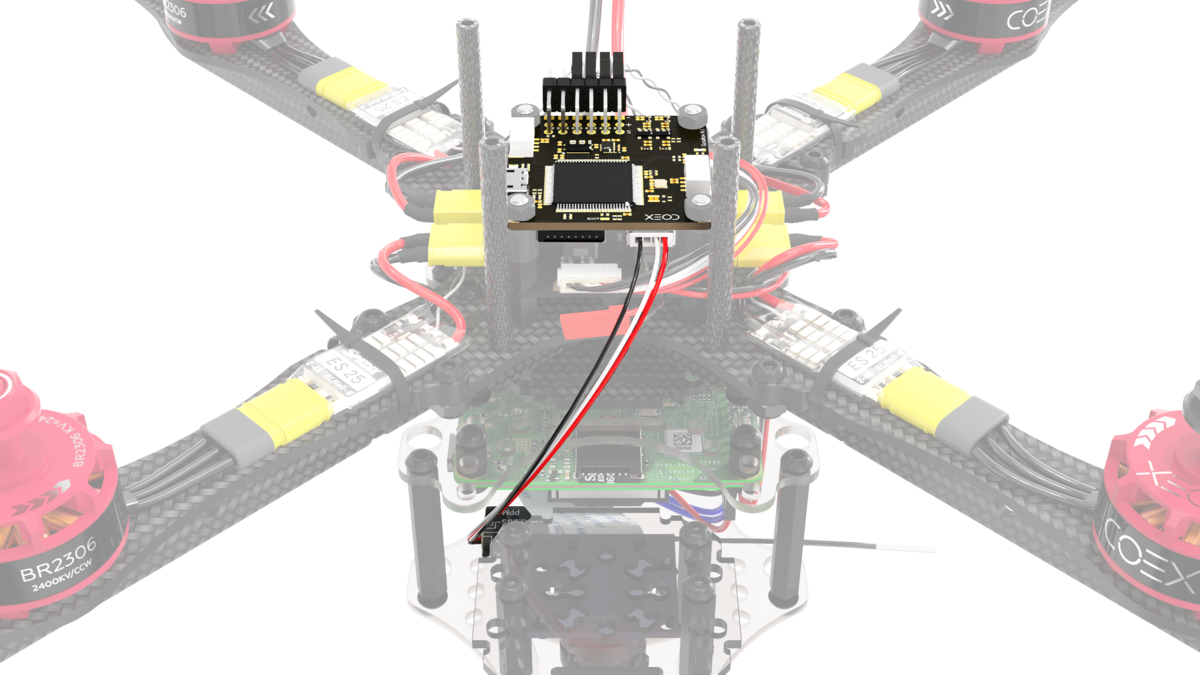
На заранее закрепленные стойки установите плату распределения питания (PDB) и зафиксируйте ее стойками 6мм. Плата распределения питания должна быть установлена таким образом, чтобы кабель подключения питания был направлен в сторону хвоста коптера.
Подключите к плате распределения питания силовые выходы регуляторов оборотов.
Если вы планируете использовать камеру Hawk Eye, припаяйте провода питания на данном этапе, так как после установки полетного контроллера сделать это будет затруднительно
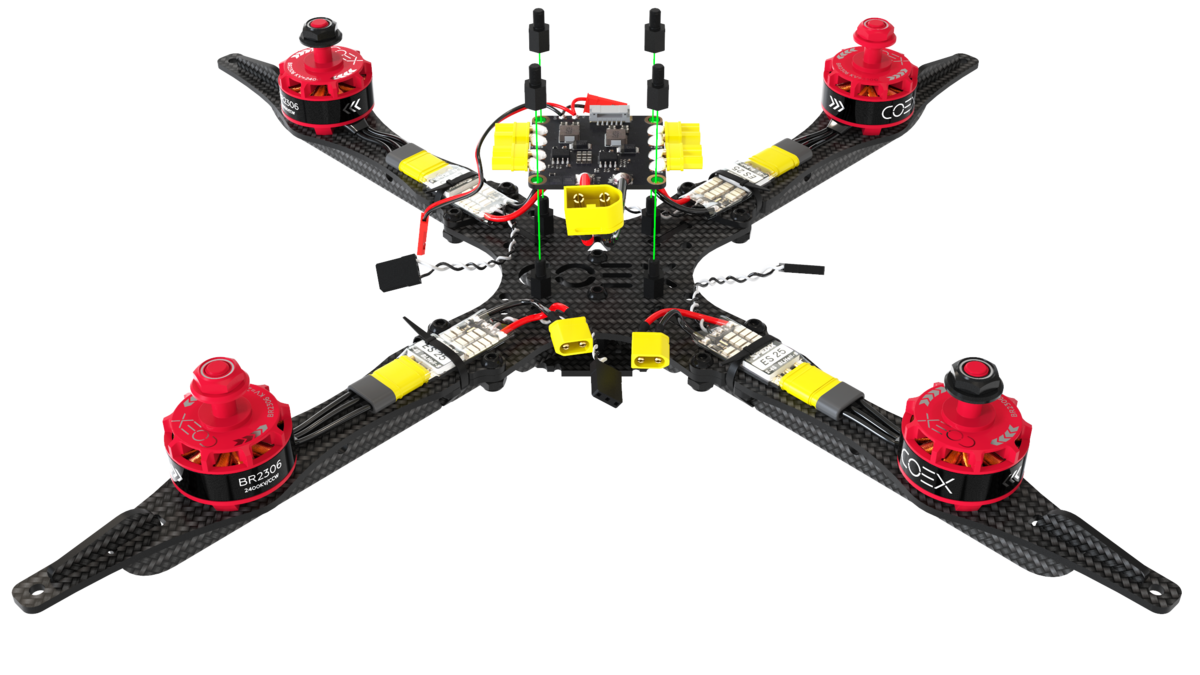
Установка полетного контроллера
Набор "Клевер 4" позволяет установить различные полетные контроллеры, к примеру COEX Pix и Pixracer.
При установке полетного контроллера обратите внимание на ориентацию платы. Если Вы установите COEX Pix серворазъемами назад (как на изображениях в инструкции) то впоследствии при настройке полетного контроллера в Autopilot Orientation необходимо будет указать значение
ROTATION_ROLL_180_YAW_90, иначе полетный контроллер будет некорректно воспринимать наклоны и повороты коптера. Для полетного контроллера Pixracer это не требуется.
COEX Pix
Перед установкой демпферных стоек, накрутите 2 слоя нейлоновых гаек, для более прочного крепления или откусите лишнюю резьбу с помощью бокорезов.
Установите демпферные стойки 6мм, на них закрепите COEX Pix с помощью нейлоновых гаек.
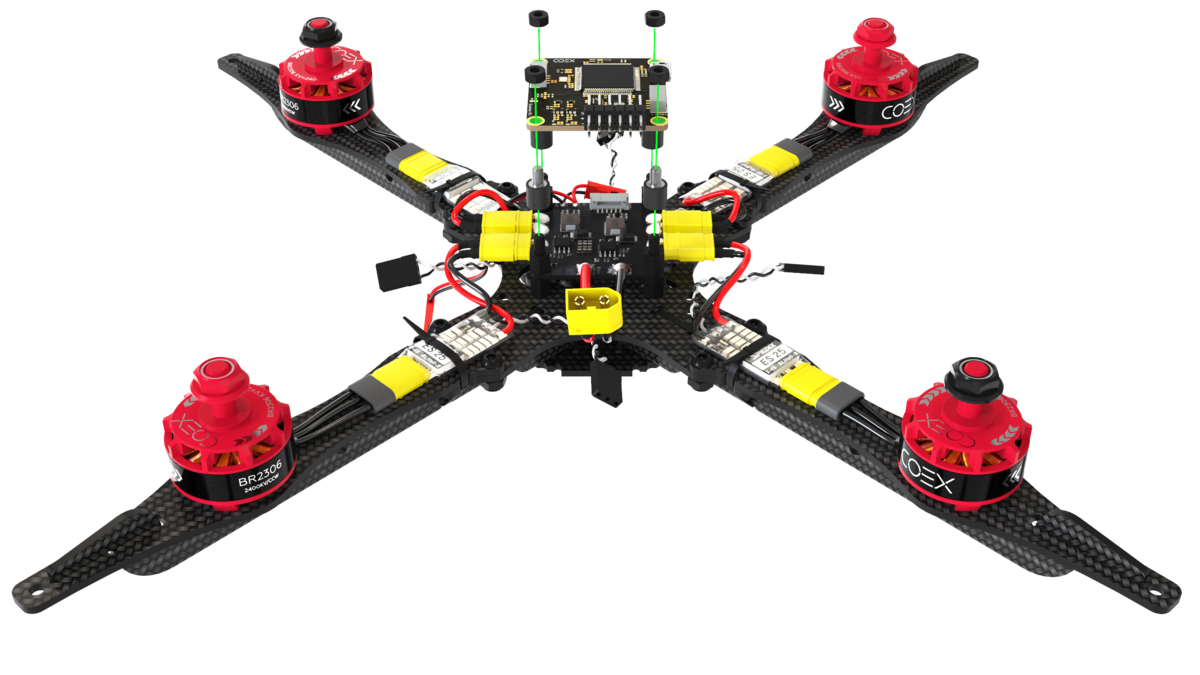
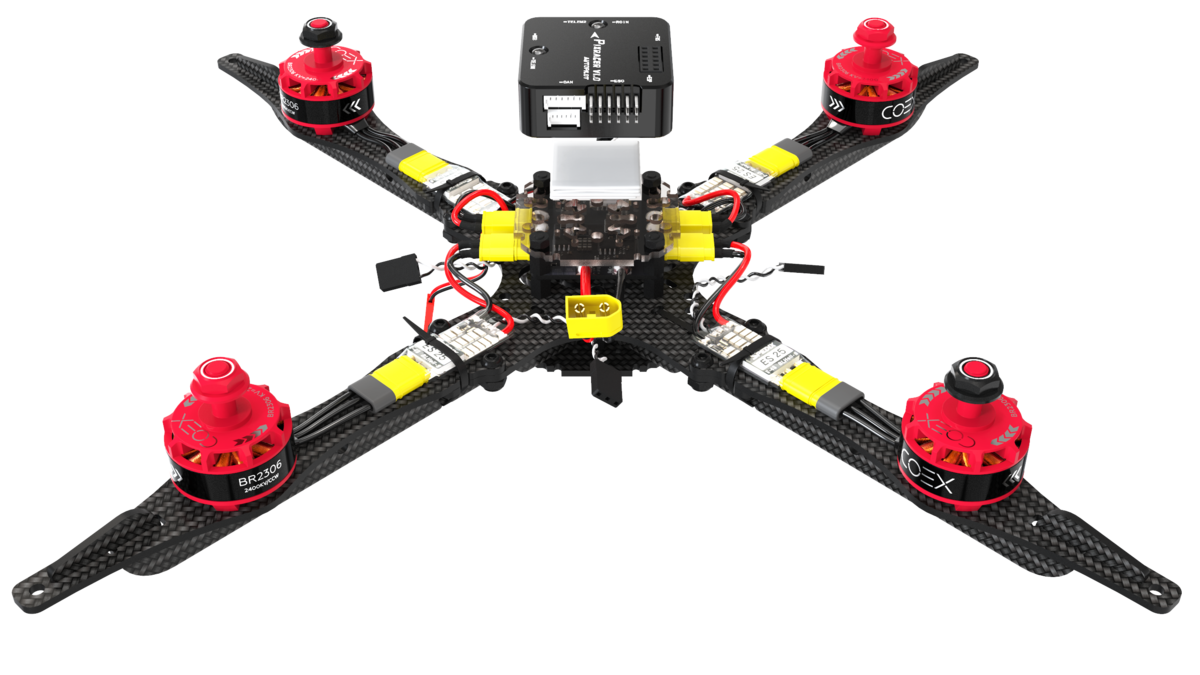
Pixracer
Установите малую деку на стойки и зафиксируйте ее нейлоновыми гайками.
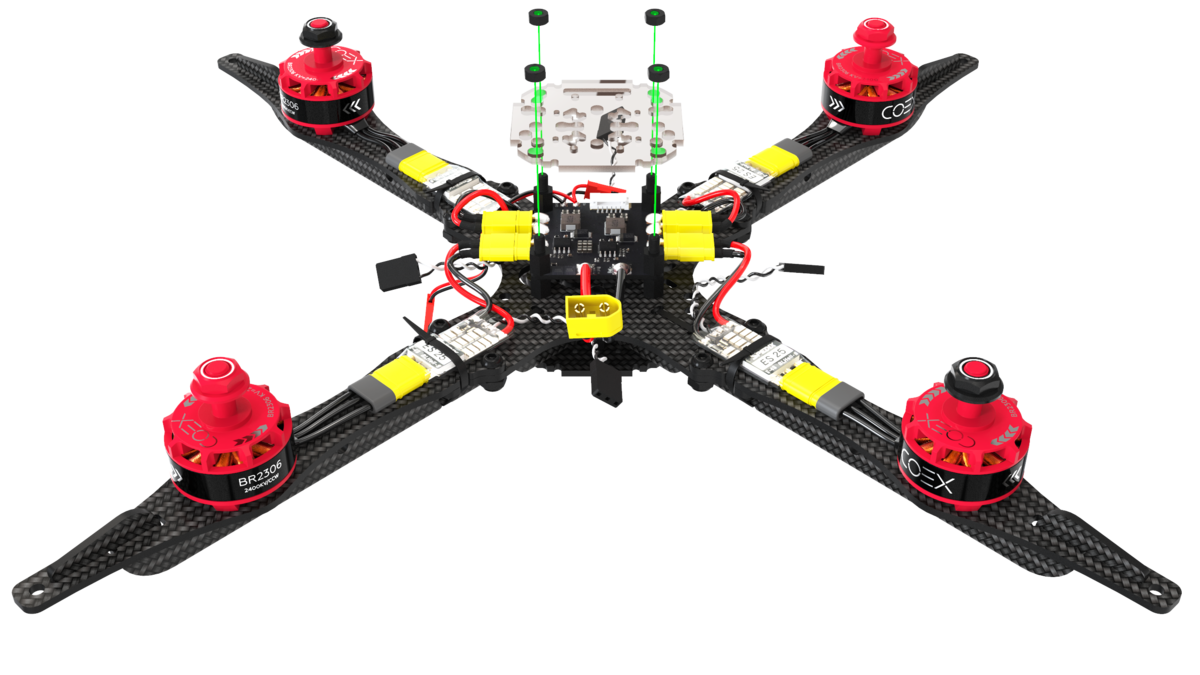
Склейте 3–4 слоя двустороннего скотча, приклейте его в центр малой деки и установите сверху Pixracer.
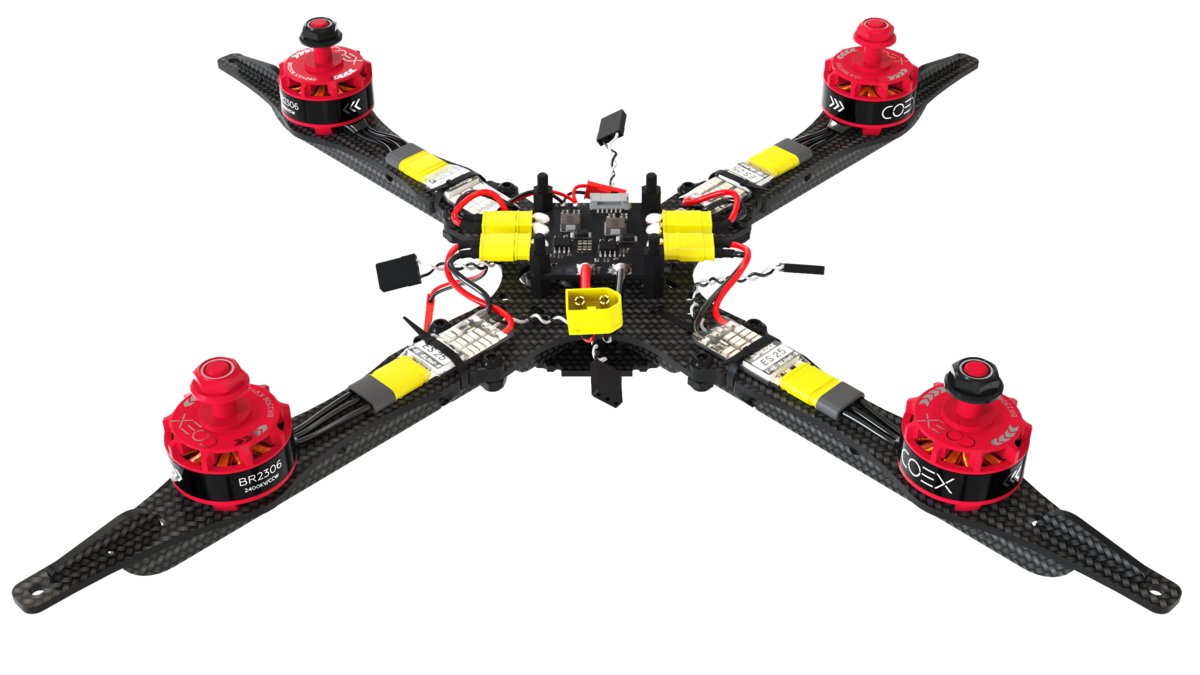
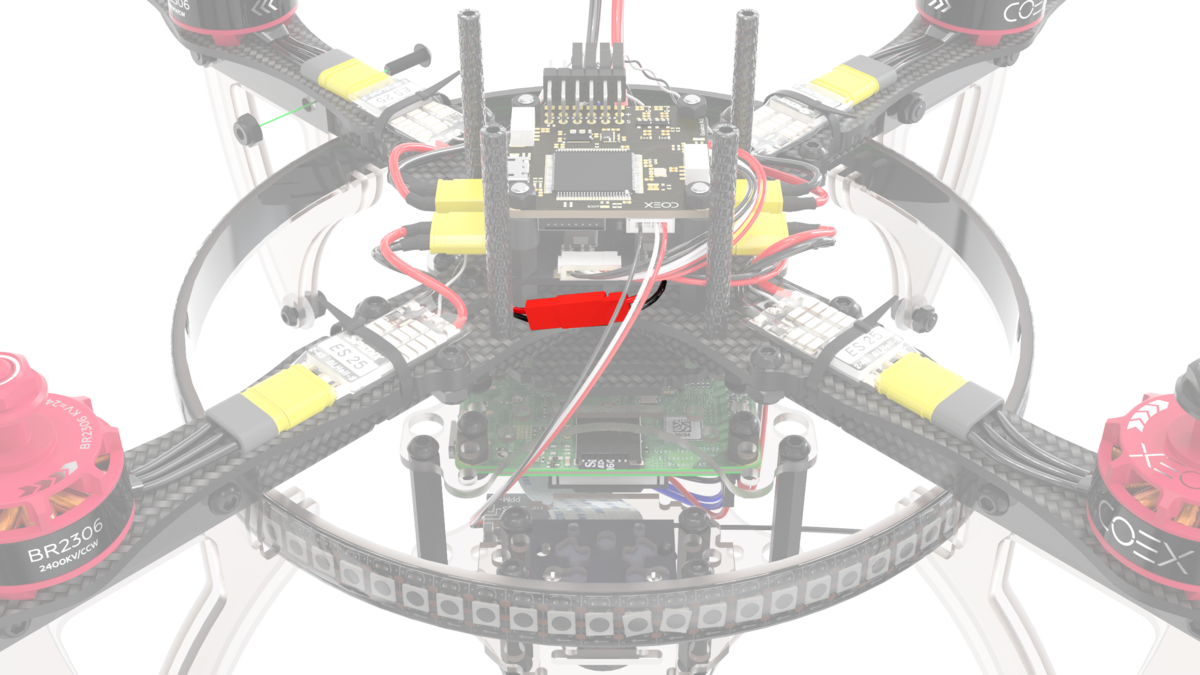
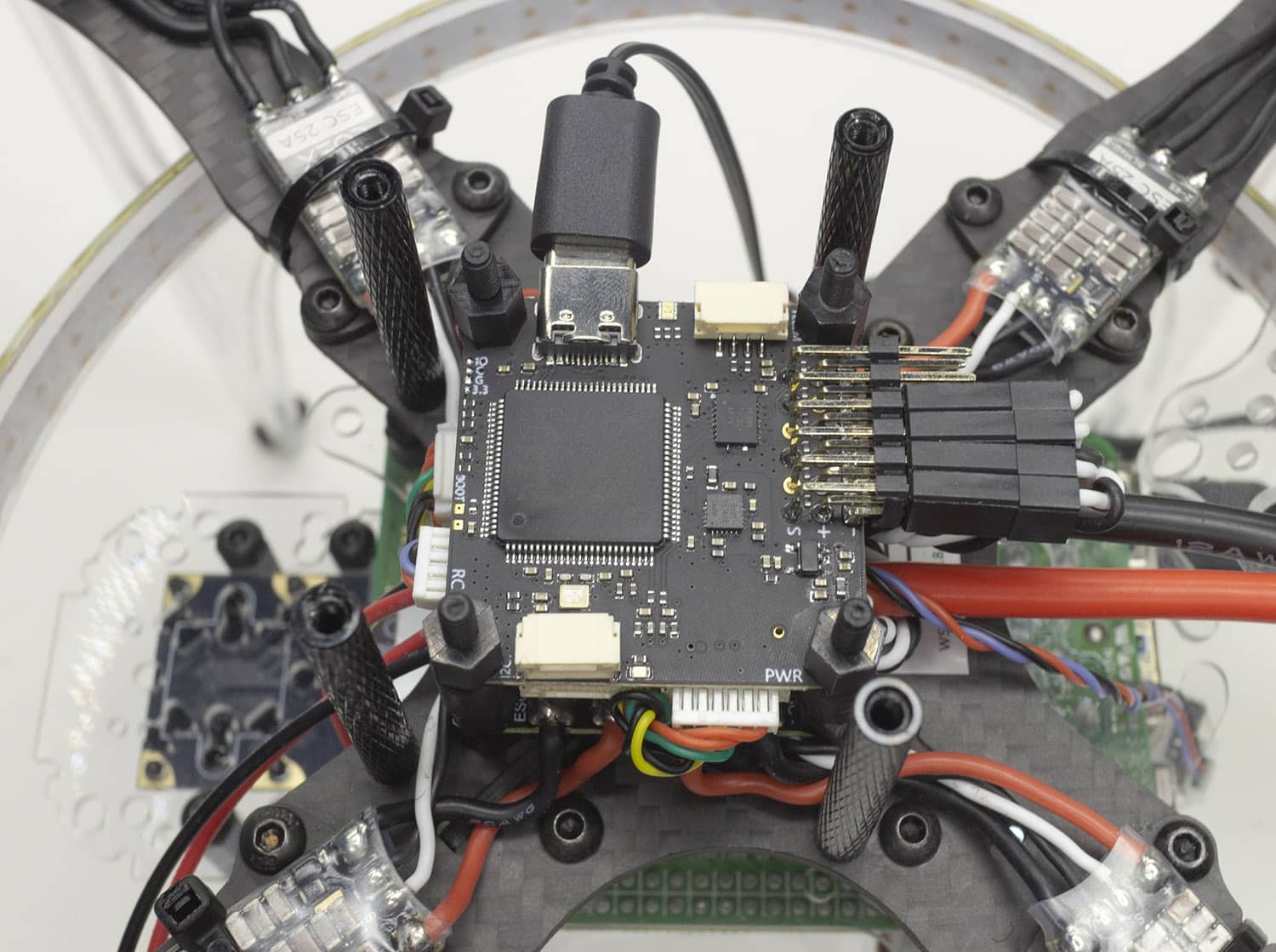
Подключение полетного контроллера
Подключите регуляторы оборотов к полетному контроллеру в соответствии со схемой.
Подключите кабель питания к плате распределения питания (PDB) и соответствующему разъему на полетном контроллере.
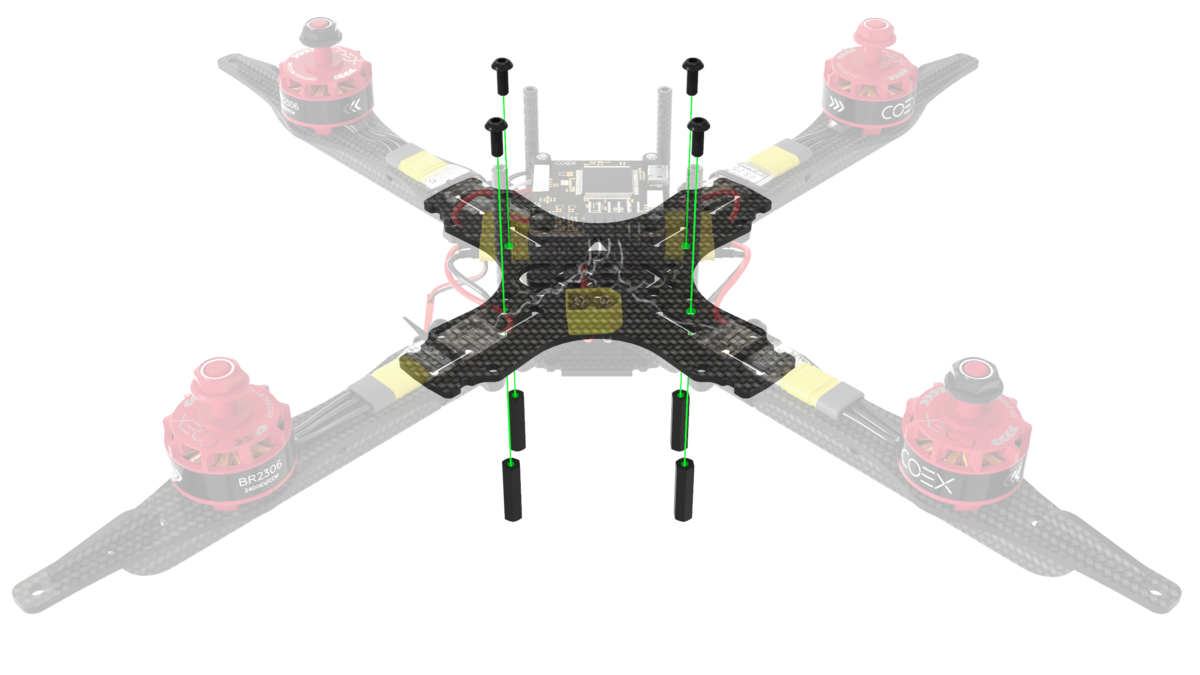
Установите алюминиевые стойки 40 мм на винты М3х10.
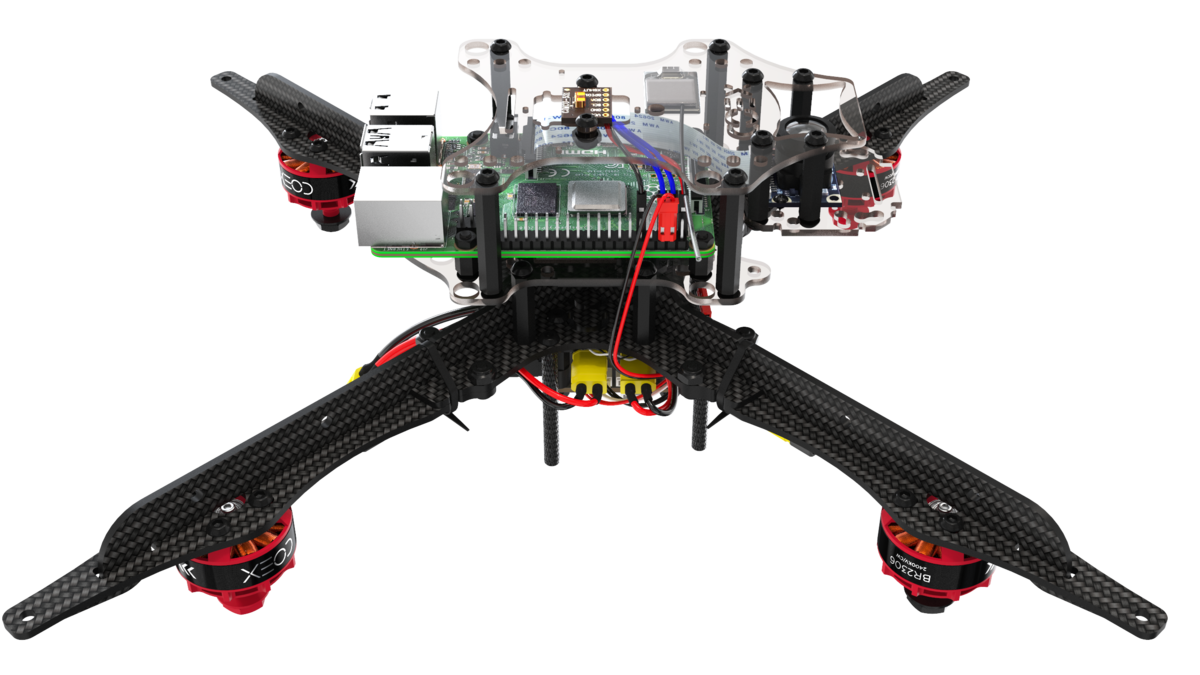
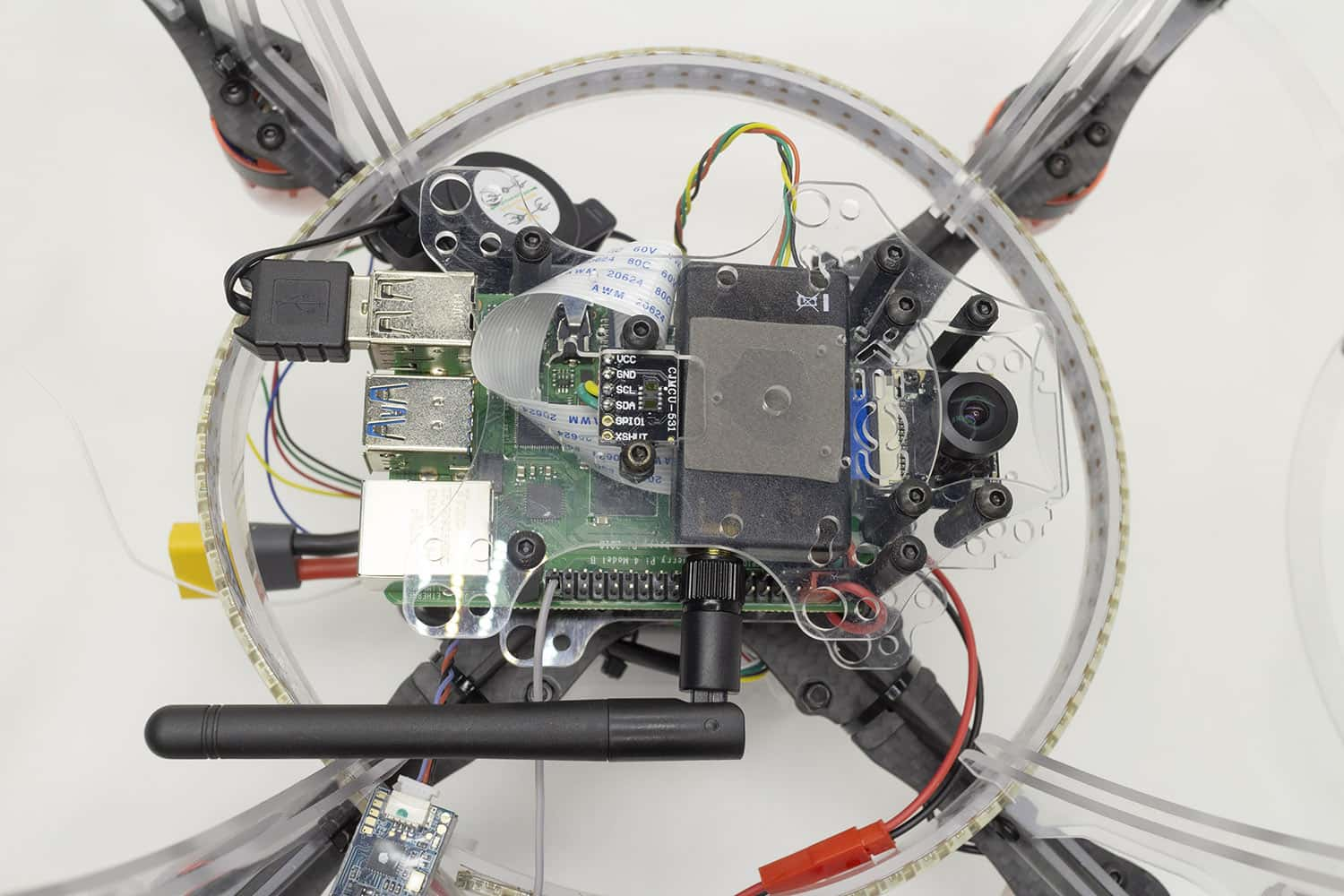
Установка Raspberry Pi
На основную деку установите стойки 20 мм, закрепите их с помощью винтов М3х8.
На монтажную деку установите стойки 6мм и стойки 30 мм, закрепите их с помощью винт М3х5 и М3х10 соответственно.
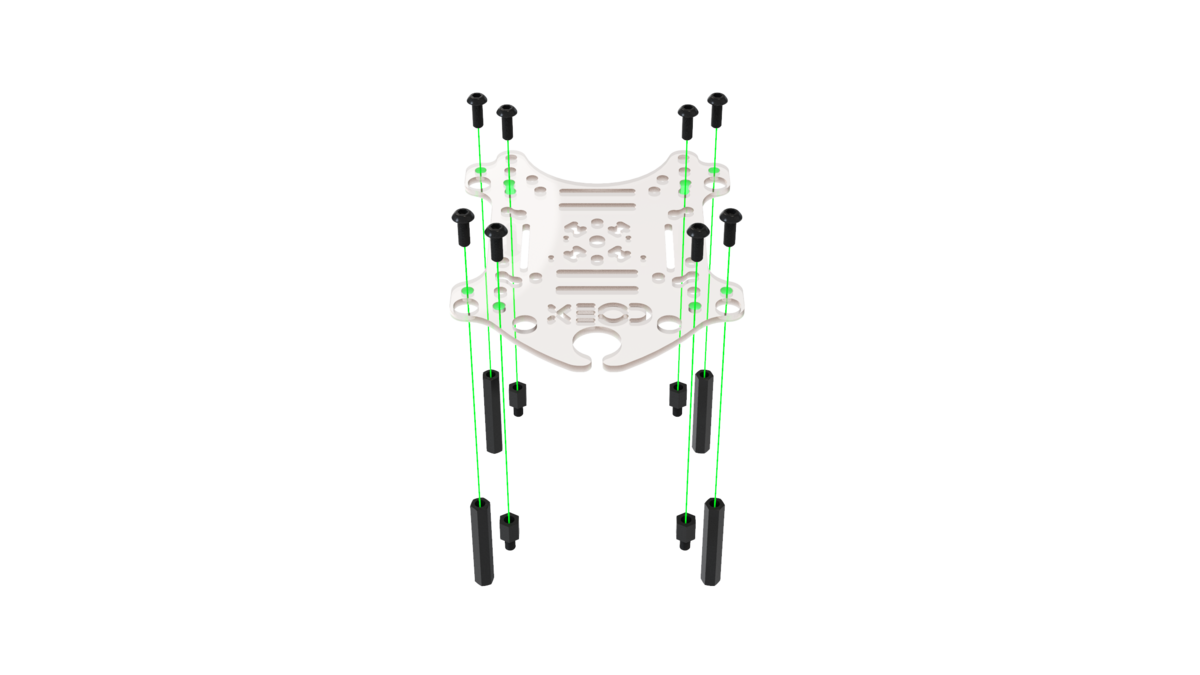
Установите собранную монтажную деку на основную и закрепите с помощью винтов М3х8.

Установите плату Raspberry Pi и зафиксируйте с помощью нейлоновых гаек.

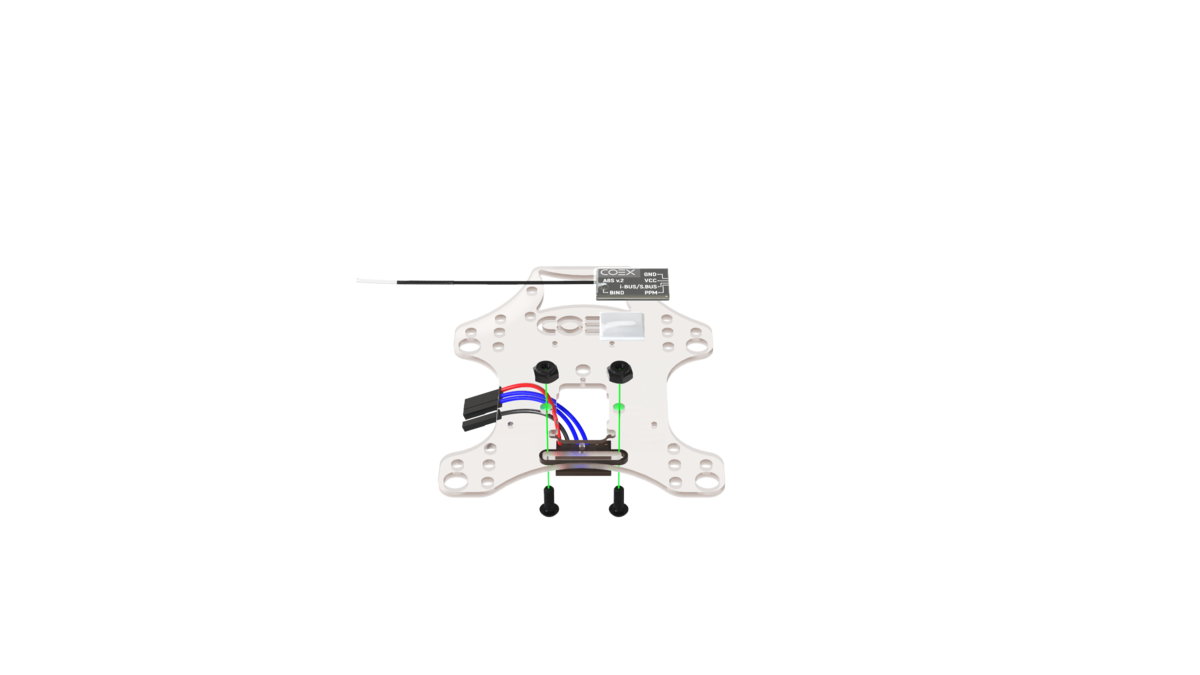
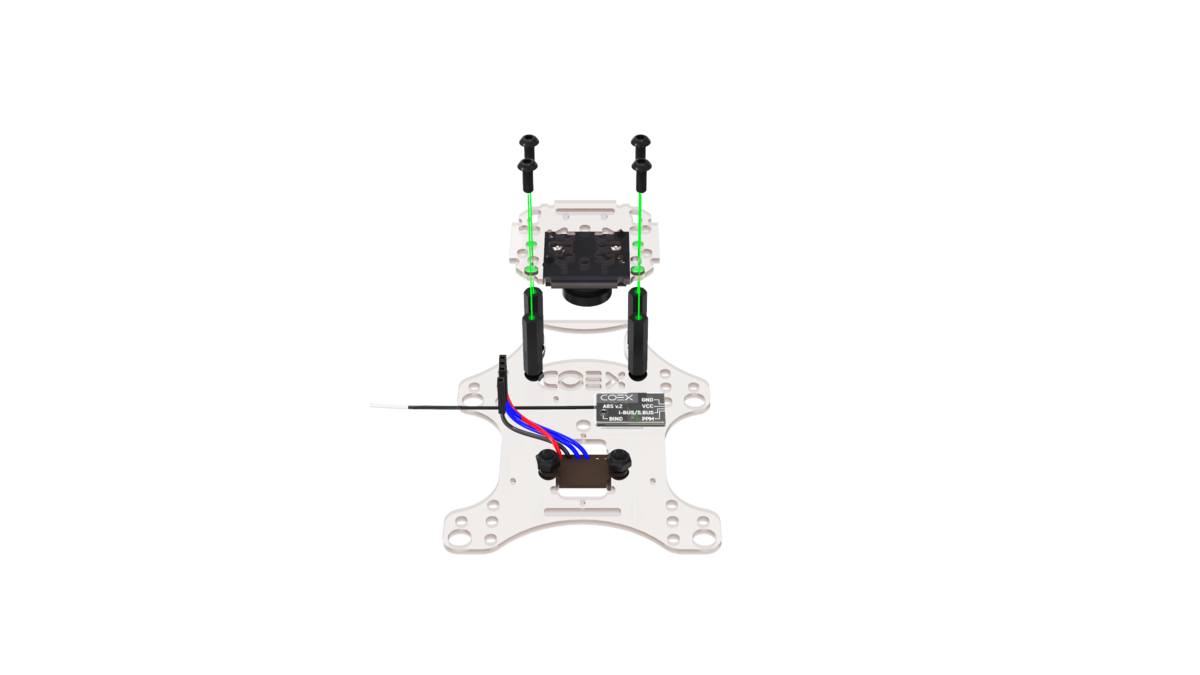
На деку захвата установите дальномер с помощью самоконтрящихся гаек и винтов М3х8, и приклейте радиоприемник с помощью двустороннего скотча.
Обратите внимание, что крепящие гайки расположены обратной стороны от платы дальномера, как на схеме, иначе есть большая вероятность повредить плату.
Также плата может быть закреплена на саморезы М2 в соседние отверстия.
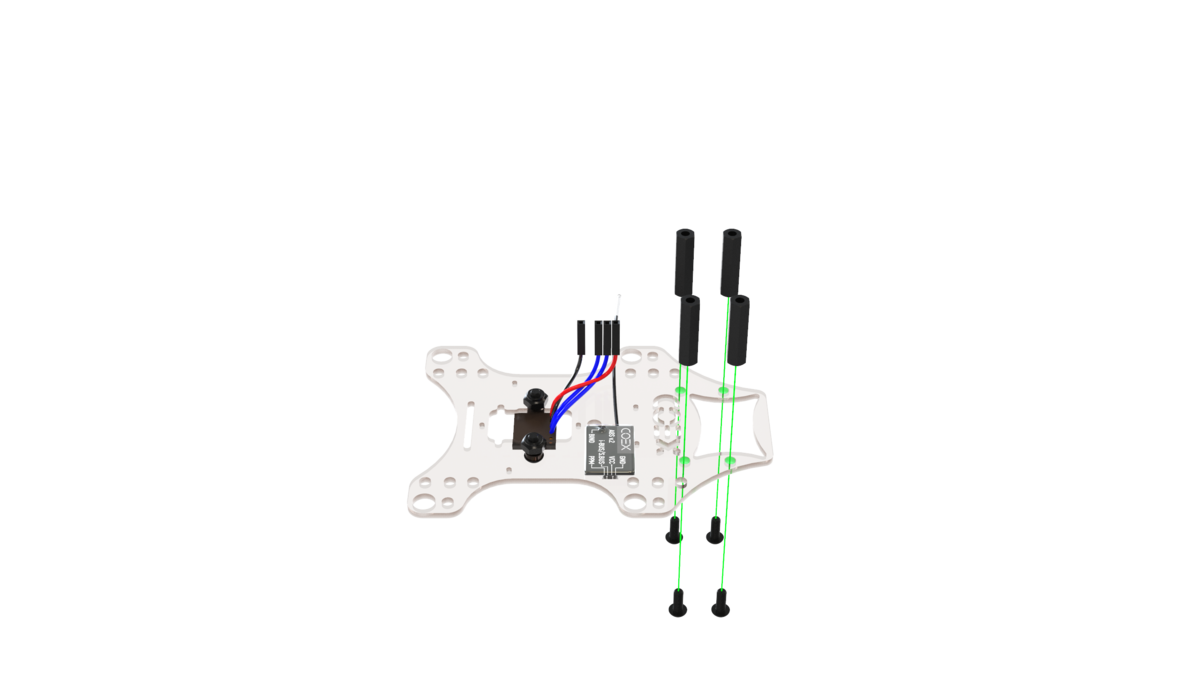
Установите 4 стойки 20мм и закрепите их с помощью винтов М3х8.
На малую монтажную деку установите камеру и зафиксируйте ее с помощью 2ух саморезов М2х5, в верхнем левом и нижнем правом углах.
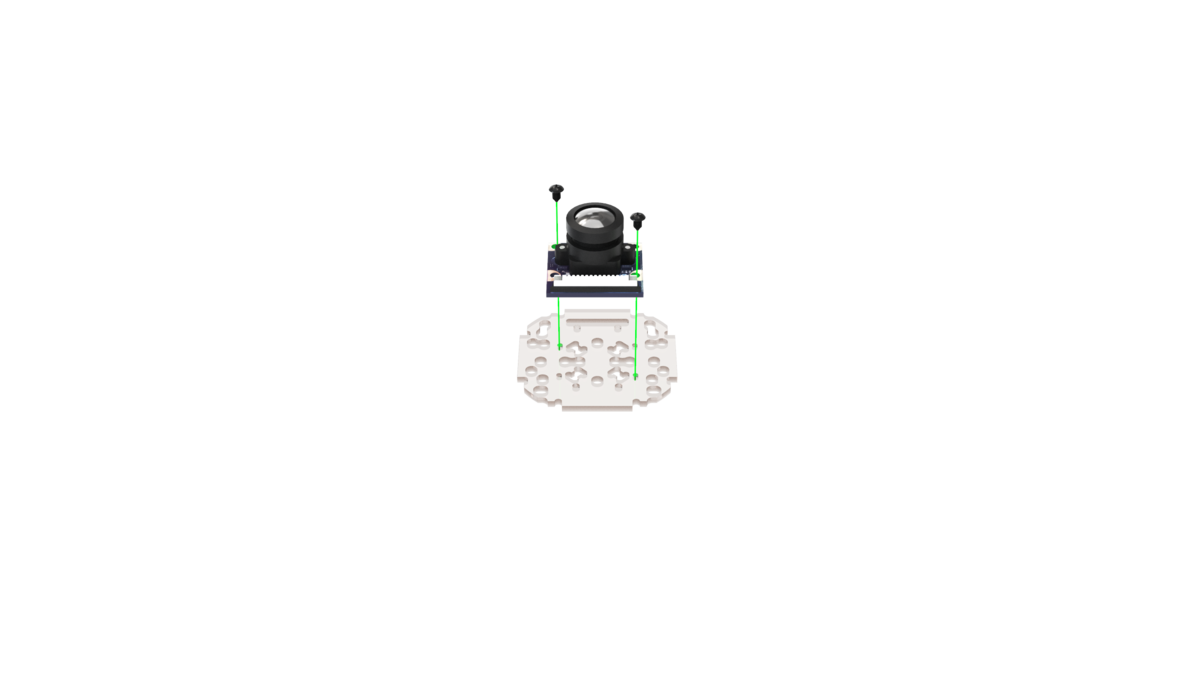
Установите модуль камеры на деку захвата и закрепите с помощью винтов М3х8.
Установите собранную деку захвата и зафиксируйте с помощью винтов М3х8.

Подключите к Raspberry Pi дальномер и кабель питания.
Подключите радиоприемник к полетному контроллеру используя разъем RCIN.
Подключите шлейф камеры к Raspberry Pi.

Подключите полетный контроллер к Raspberry Pi с помощью USB-кабеля.
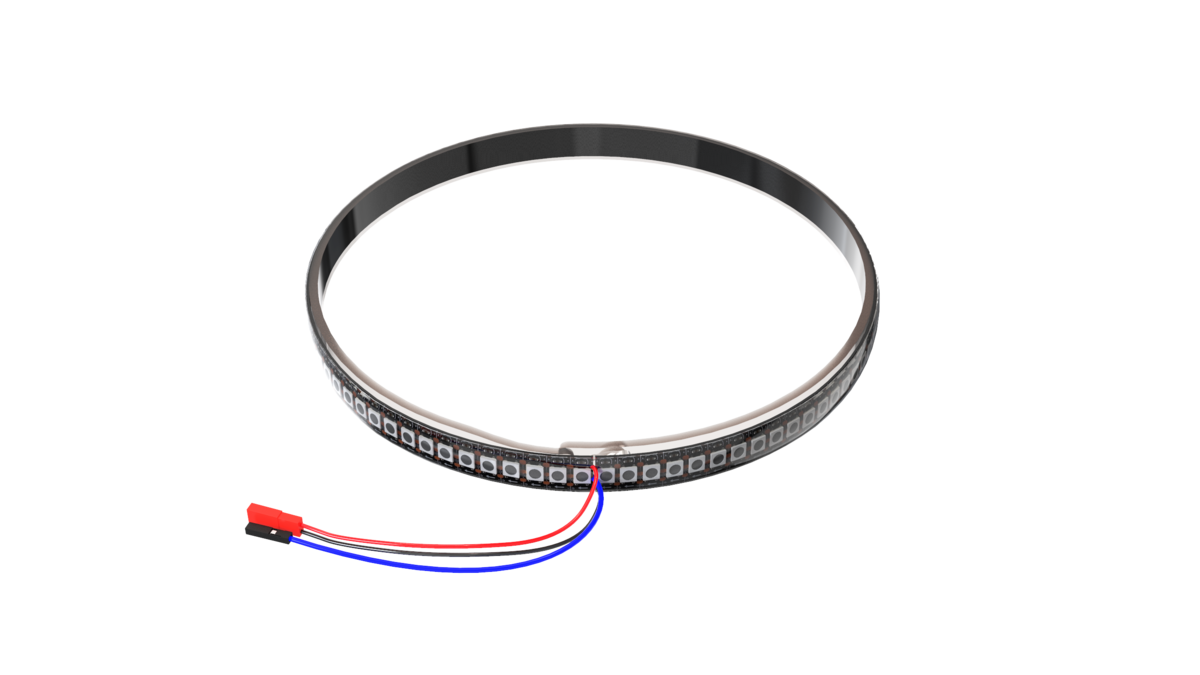
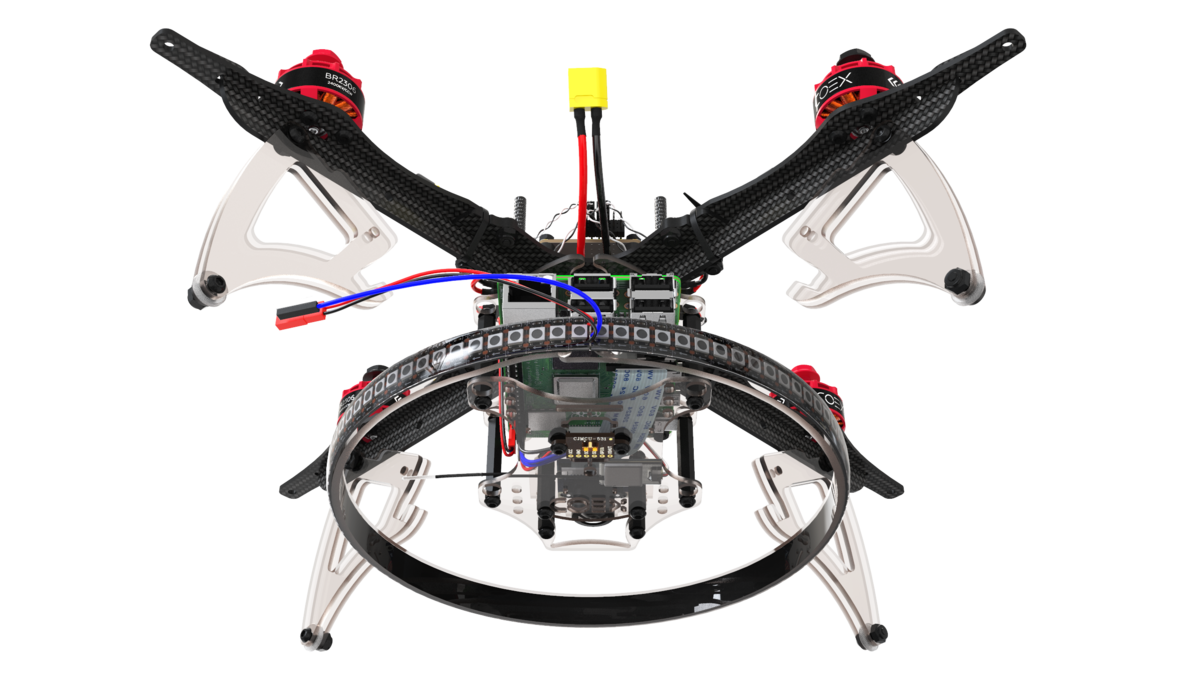
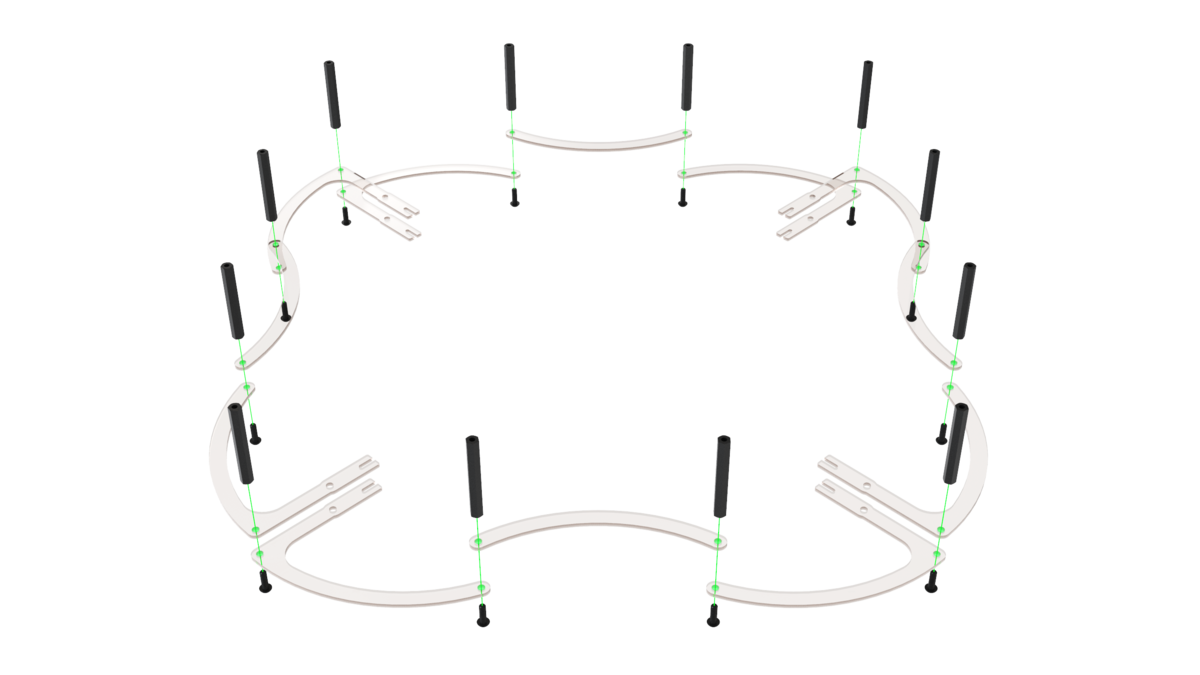
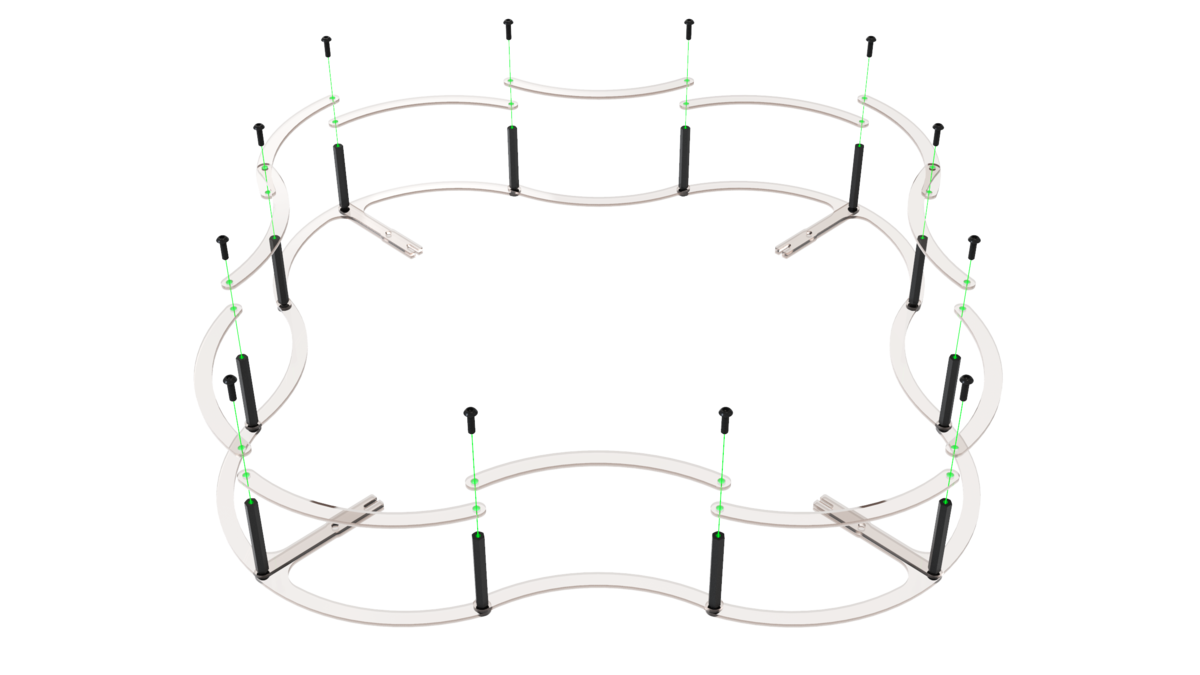
Установка LED ленты и ножек
Соберите обруч для светодиодной ленты, объединив замок на концах.

Наклейте светодиодную ленту на обруч, для большей крепкости притяните ее с помощью 3-4 хомутов.
Установите ножки на пластину жесткости с помощью самоконтрящихся гаек и винтов М3х10 используя только крайние монтажные отверстия. Снизу, между пластинами ножек установите демпферное силиконовое колечко.

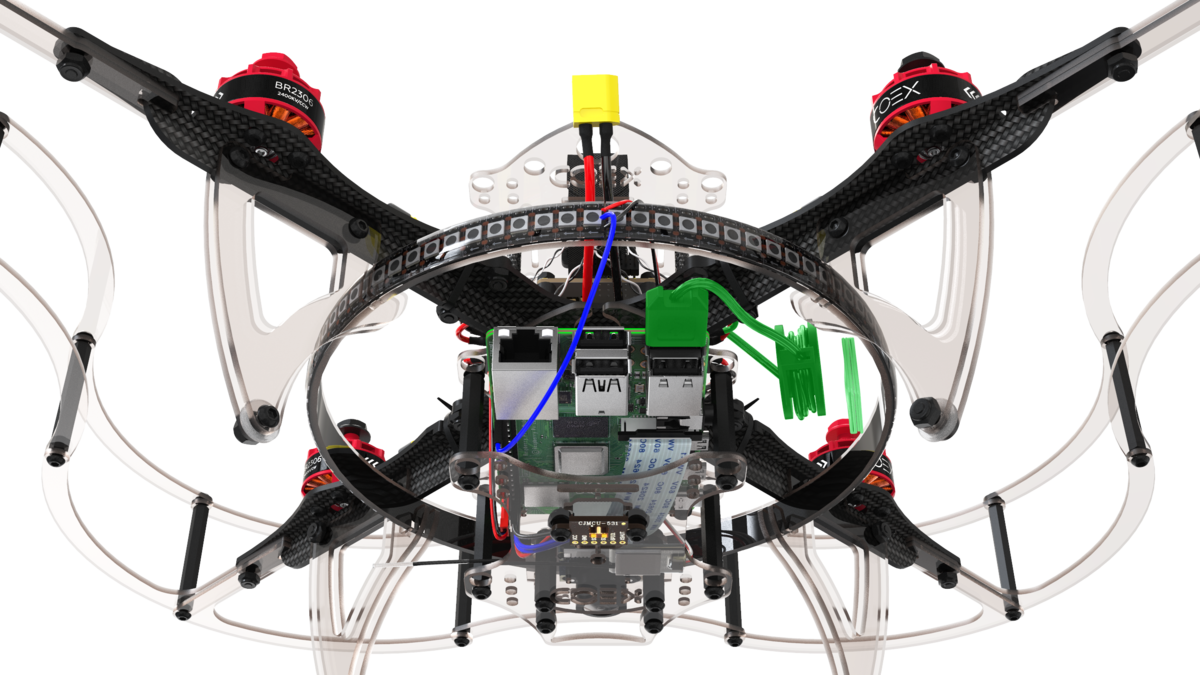
Отогните ножки назад и в специальный паз на них установите обруч со светодиодной лентой, таким образом, чтобы кабели подключения выходили с хвостовой стороны коптера.
Закрепите ножки с помощью самоконтрящихся гаек и винтов М3х10.
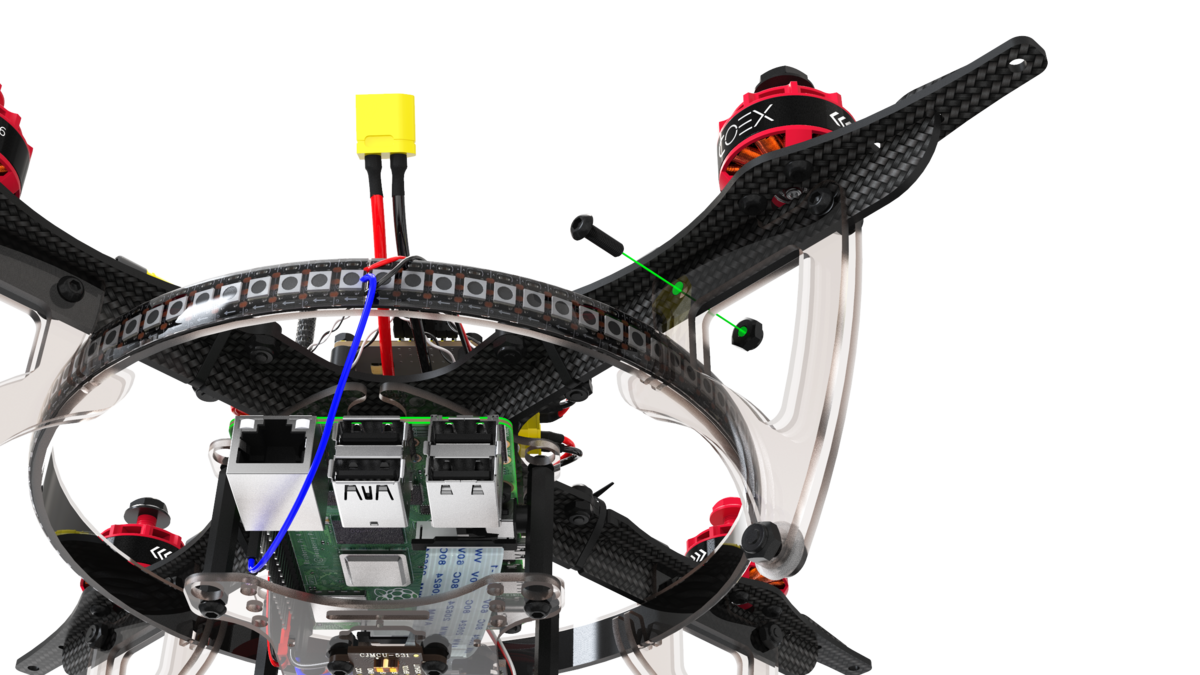
Подключите питание светодиодной ленты (красный, черный кабели) в короткий разъем JST на плате распределения питания.
Подключите сигнальный выход светодиодной ленты (белый кабель) в Raspberry Ri, к пину GPIO21.

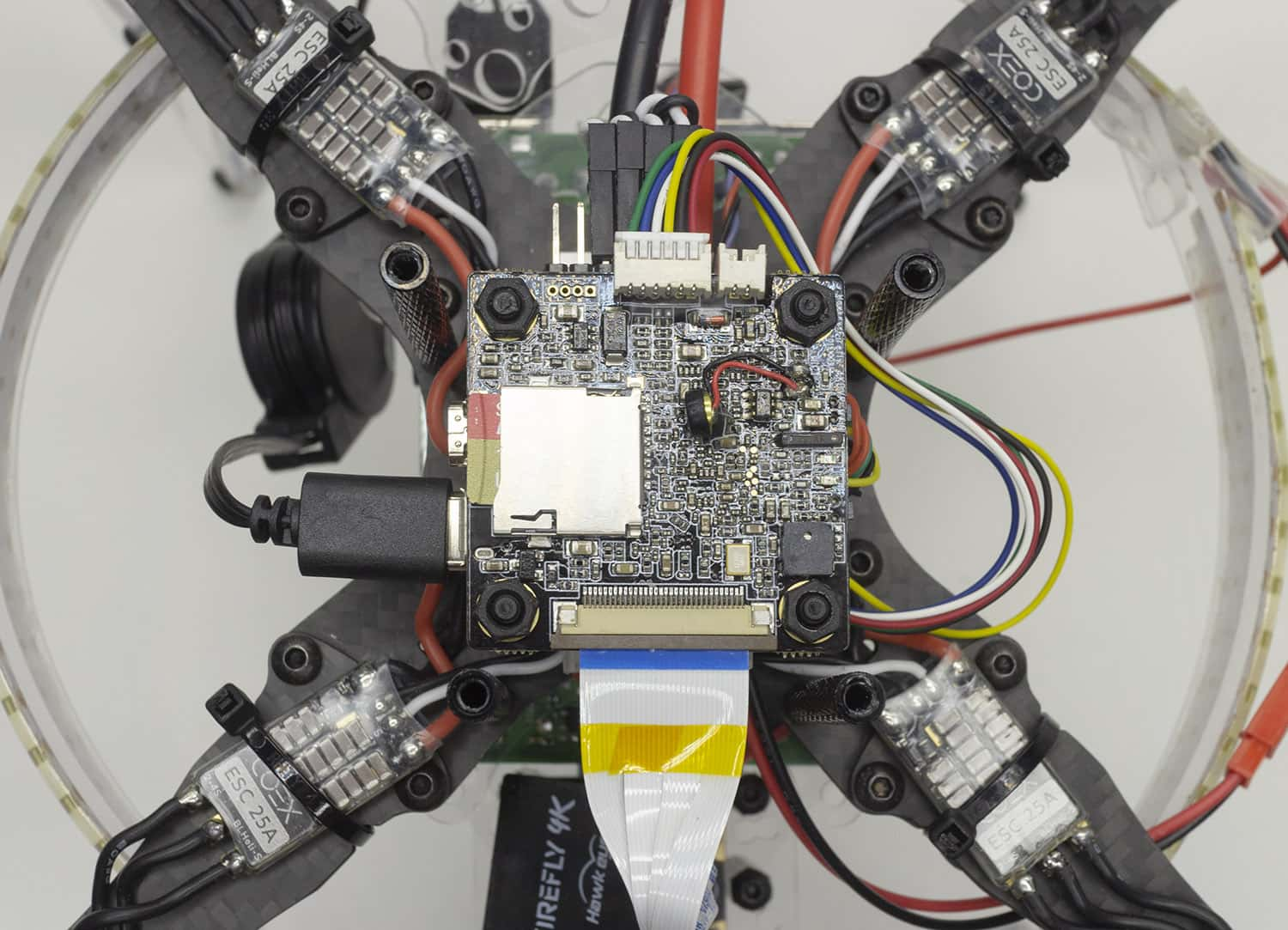
Установка камеры Hawk Eye
Установите скобу на камеру и зафиксируйте её винтами М2.

Зафиксируйте полетный контроллер нейлоновыми стойками 6мм.
Сверху на стойки установите плату камеры, зафиксируйте её нейлоновыми гайками и подключите шлейф.
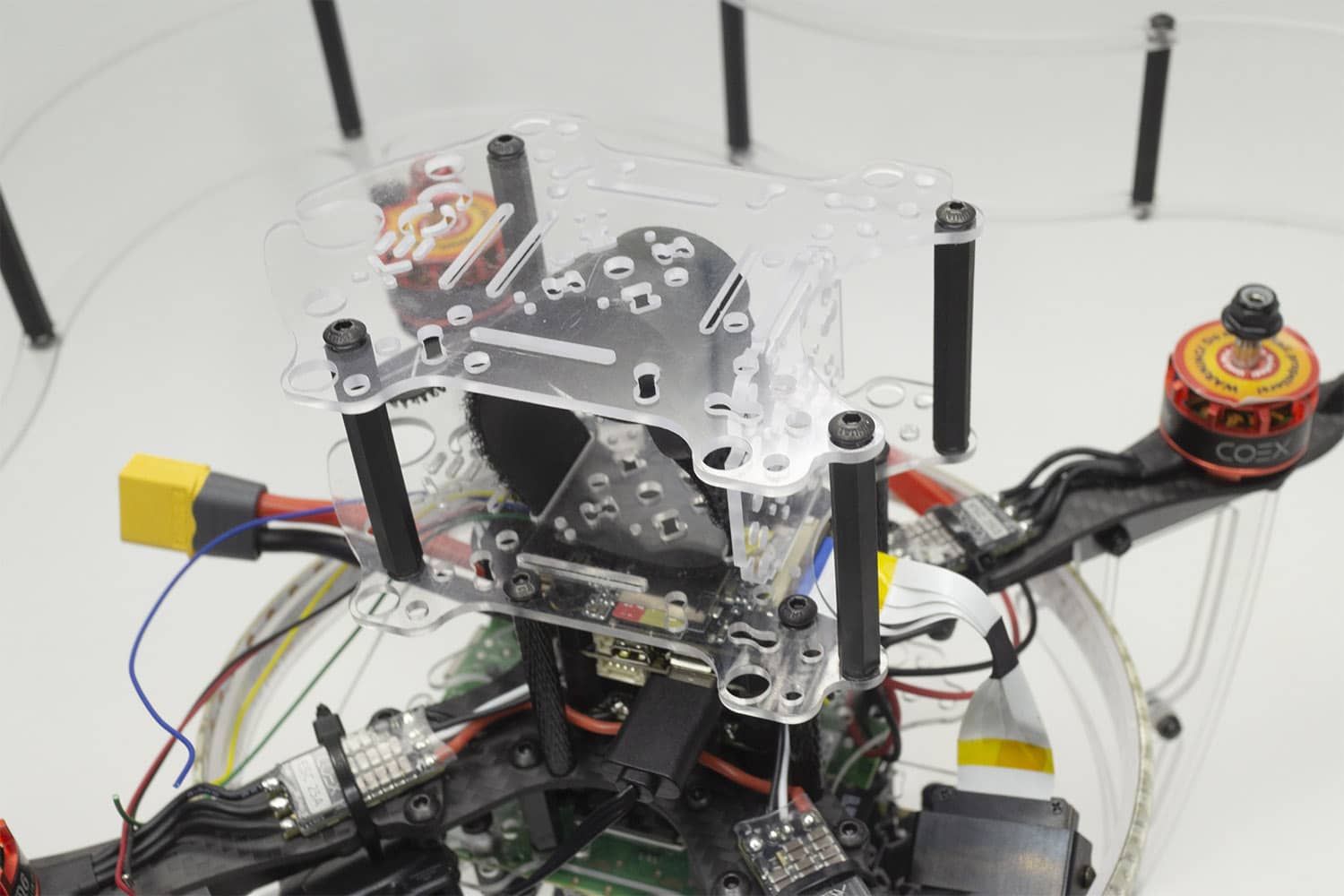
Установите верхнюю деку. Установите 4 нейлоновых стойки 40мм, вставьте малую монтажную деку вертикально и зафиксируйте сверху еще одной монтажной декой, как показано на фотографии.
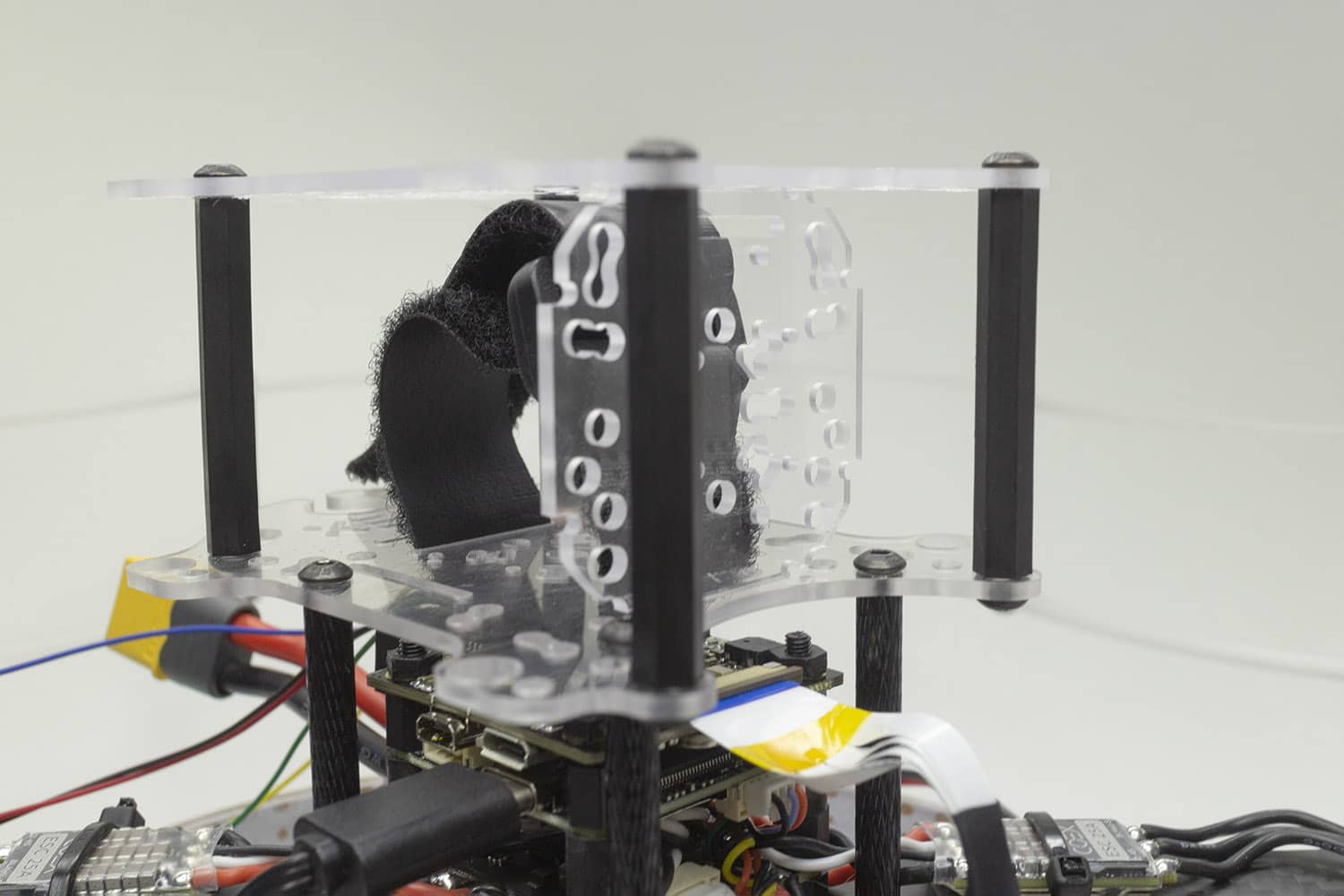
Зафиксируйте камеру на малой монтажной деке при помощи двустороннего скотча.
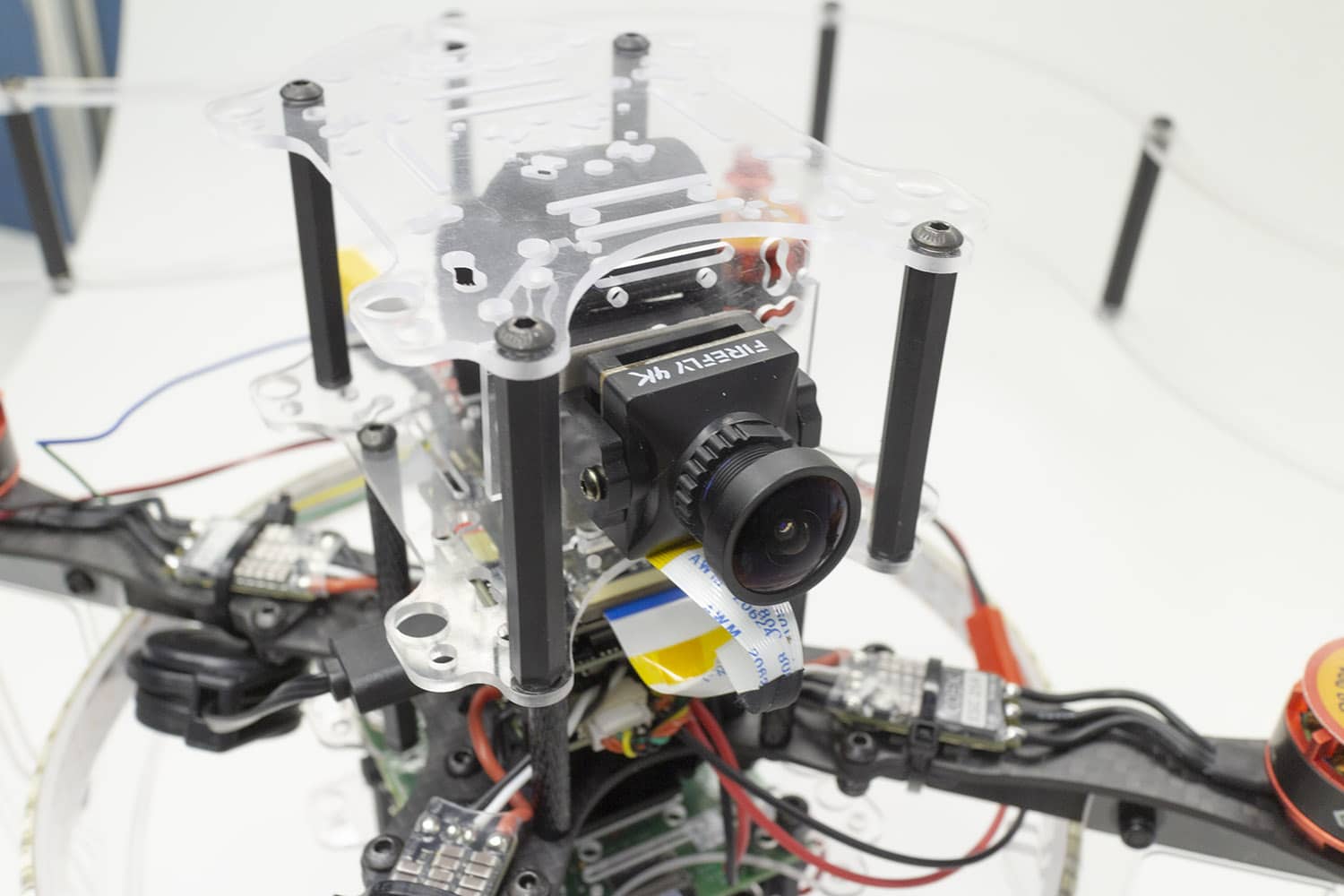
Теперь можно производить настройку камеры.
Установка GPS
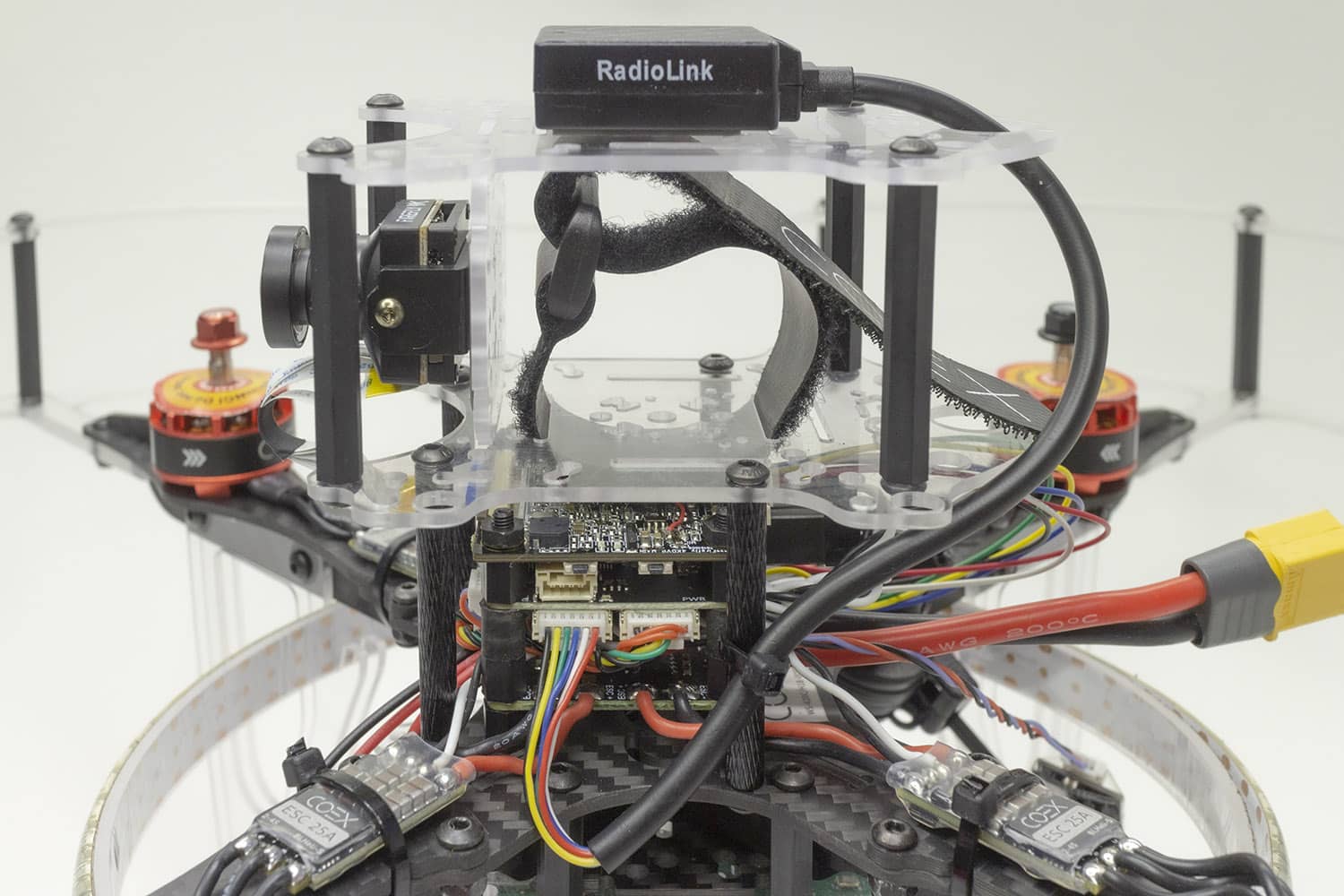
Зафиксируйте GPS-приемник на верхней деке при помощи двустороннего скотча. Стрелка на приемнике должна совпадать с передом коптера.
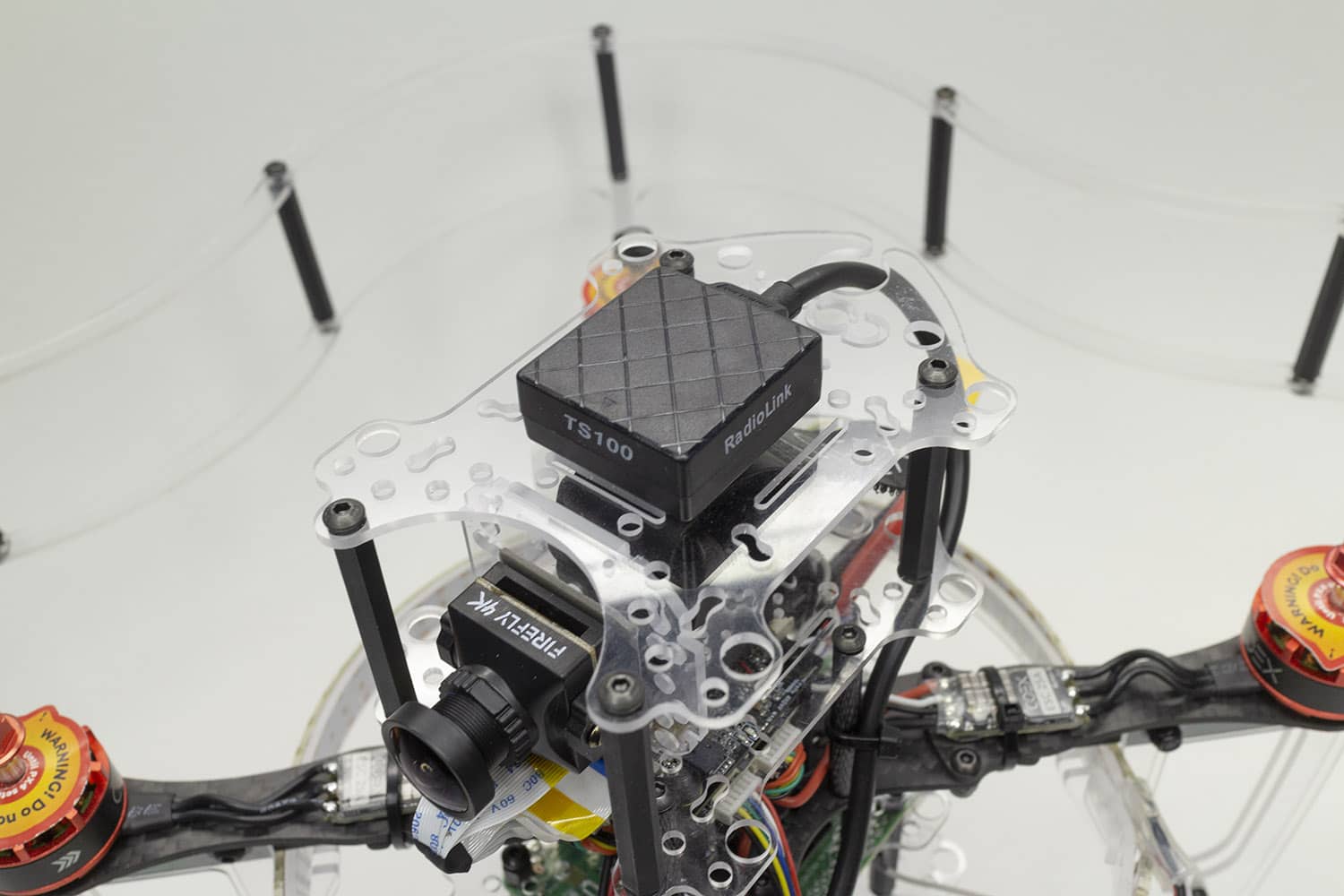
Подключите приемник в разъем GPS полетного контроллера, и зафиксируйте кабель при помощи стяжки.
Настройка и использование GPS описаны в данной статье.
Установка радио-телеметрии
Зафиксируйте модуль телеметрии на нижней деке при помощи двустороннего скотча.
Подключите модуль при помощи кабеля в порт Telem1 полетного контроллера. Теперь можно выполнить настройку.
Установка защиты
Соберите нижний уровень защиты с помощью стоек 40 мм и винтов М3х10.
Соберите верхний уровень защиты с помощью винтов М3х10.
Установите монтажную деку и закрепите ее винтами М3х8.
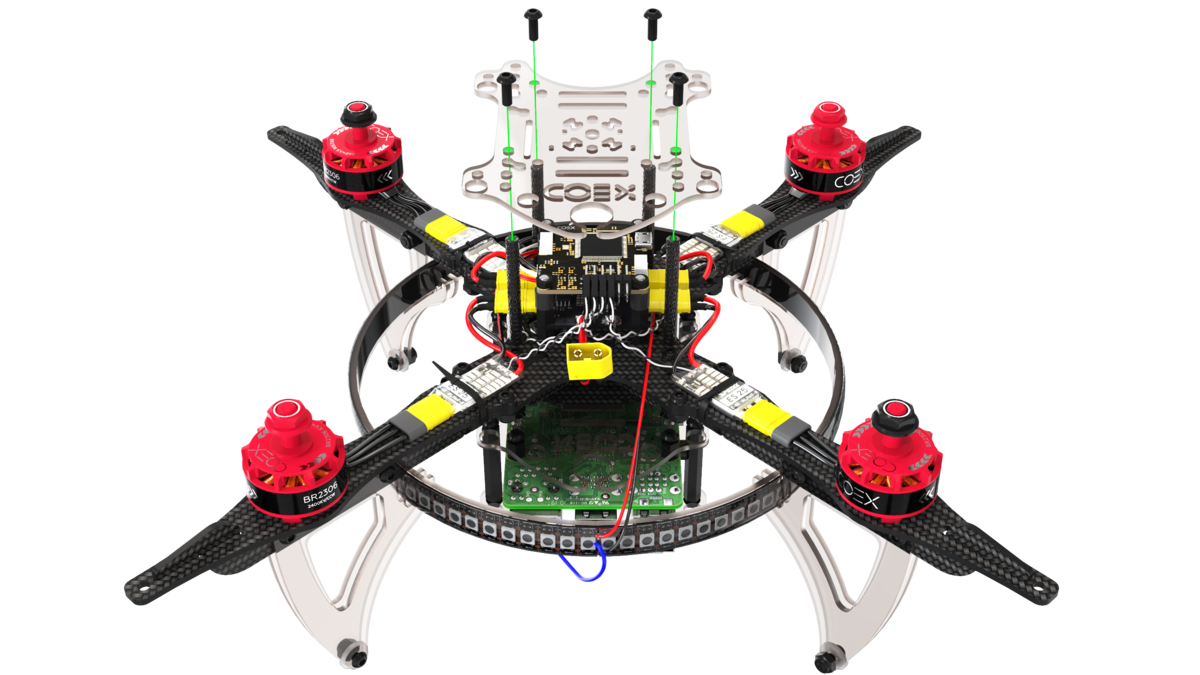
Установите защиту и закрепите на лучах с помощью самоконтрящихся гаек и винтов М3х10.
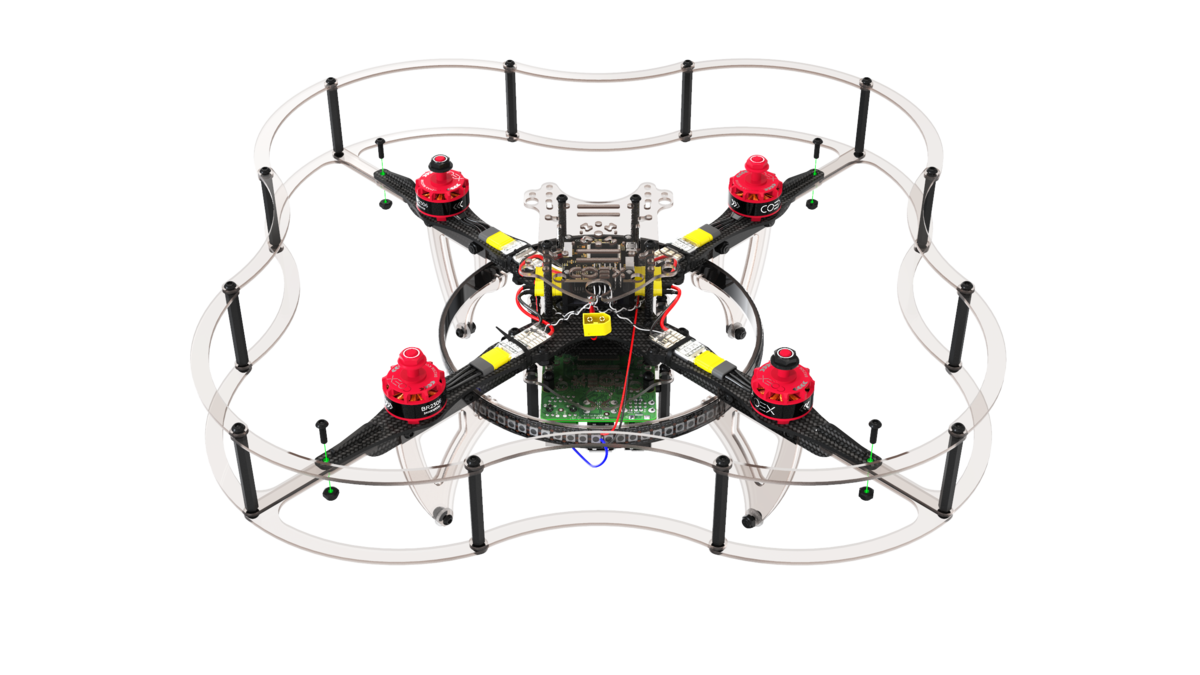
Дрон собран, далее произведите настройку.