Полет
Этот раздел объясняет основы управление квадрокоптером с использование пульта радиоуправления в различных режимах (для автономных полетов смотрите раздел "Программирование").
Основные возможности радиоаппаратуры
Прежде чем запускать ваш коптер, необходимо разобраться, как работает пульт радиоуправления ("аппаратура" в общепринятой терминологии авиамоделизма).
Управление дроном происходит с помощью двух стиков на аппаратуре. По умолчанию левый стик отвечает за газ и рысканье, а правый за крен и тангаж. Данные термины используются для всех летательных судов, от самолетов до квадрокоптеров.

- Газ (throttle) – отвечает за скорость вращения двигателей.
- Рысканье (yaw) – отвечает за повороты вокруг вертикальной оси (Z), по часовой (при наклоне вправо) и против часовой (при наклоне влево) стрелки.
- Тангаж (pitch) – отвечает за наклон или движение вперёд/назад.
- Крен (roll) – отвечает за наклон или движение влево/вправо.
Данные описания предполагают, что коптер находится задней частью к пилоту.

Полетные режимы
Ручное полет с использованием полетного контроллера PX4 может происходит с использованием разных полетных режимов, которые определяют назначения стиков радиопульта и другие характеристики полета. Полный список полетных режимов приведен в статье "Полетные режимы".
Основные ручные режимы разобраны далее.
STABILIZED - режим стабилизации горизонтального положения. В данном режиме коптер будет удерживать горизонт, если им не управлять. Назначение стиков:
- Газ – усредненная скорость вращения моторов.
- Рысканье – угловая скорость вокруг вертикальной оси.
- Тангаж – угол наклона вокруг поперечной оси (вперед/назад).
- Крен – угол наклон вокруг продольной оси (влево/вправо).
POSCTL – режим удержания позиции (требуется включенная система позиционирования). Назначение стиков:
- Газ - вертикальная скорость полета.
- Рысканье - угловая скорость вокруг вертикальной оси.
- Тангаж - линейная скорость полета дрона (вперед/назад).
- Крен - линейная скорость полета дрона (влево/вправо).
ACRO – режим управление средней скоростью вращения моторов и угловыми скоростями дрона. Этот режим является наиболее сложным для пилотирования и чаще всего применяется дрон-рейсерами и в шоу 3D-пилотирования для выполнения трюков. Назначение стиков:
- Газ – усредненная скорость вращения моторов.
- Рысканье – угловая скорость вокруг вертикальной оси.
- Тангаж – угловая скорость вокруг поперечной оси (вперед/назад).
- Крен – угловая скорость вокруг продольной оси (влево/вправо).
В других полетных контроллерах аналогичные полетные режимы могут называться по-другому.
Подготовка к полету
Установка пропеллеров и АКБ
Установите ремешок для аккумулятора.
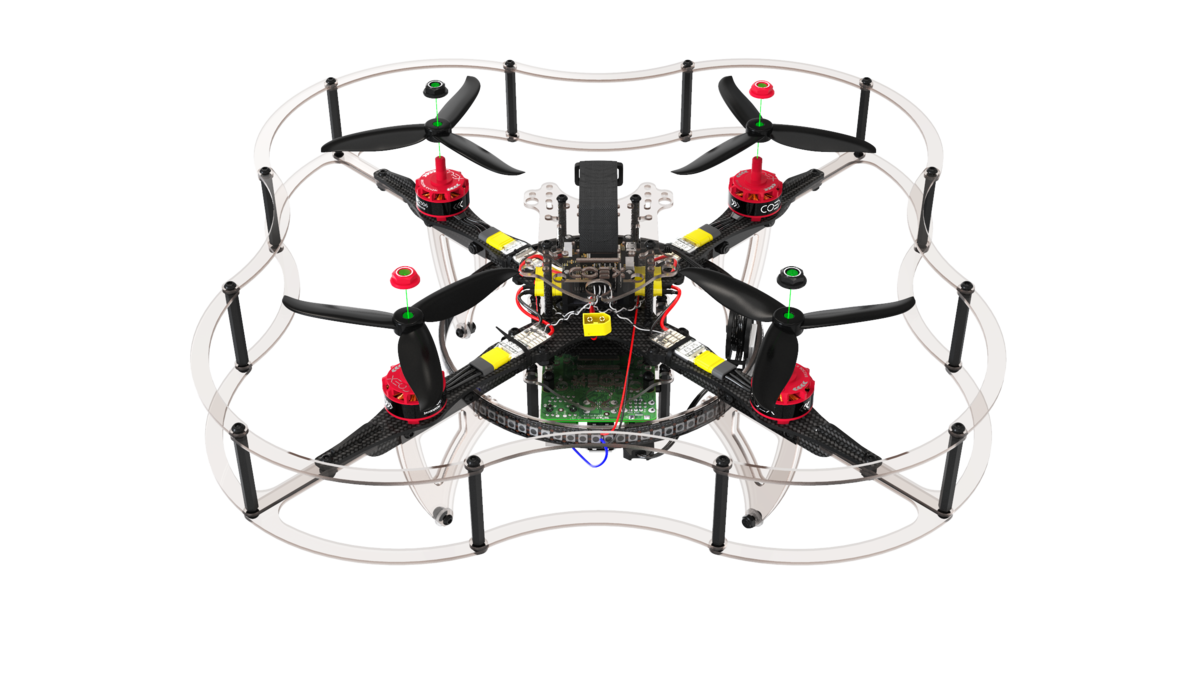
Установите пропеллеры в соответствии со схемой направления движения моторов.
Закрепите пищалку и установите аккумулятор.

Настройка пищалки
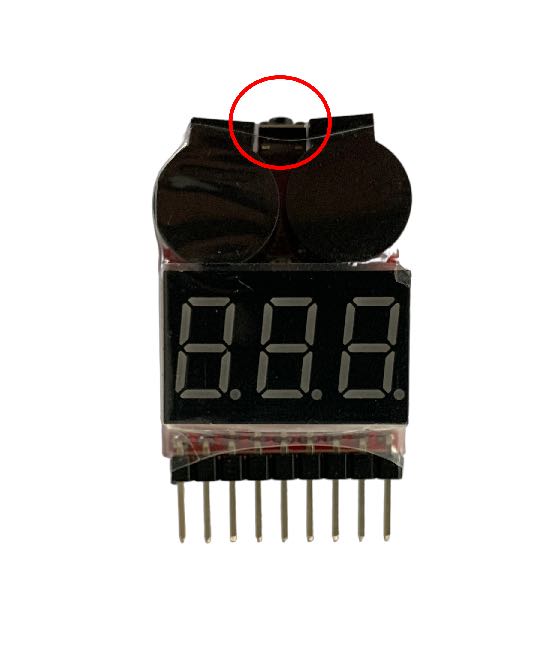
Для того, чтобы не переразрядить и не испортить аккумулятор, рекомендуется использовать индикатор напряжения (пищалка).
Для настройки пищалки подключите ее к балансировочному разъему вашего аккумулятора. Теперь, нажимая на кнопку в основании будет изменяться минимальное напряжение на ячейках. Оптимальное значение минимального напряжения является 3.5-3.6 V.

Состояния готовности к полету
Прежде чем начинать полет, необходимо перевести коптер в состояние Armed.
- Состояние Armed – моторы вращаются в соответствии с положением стика газа, коптер готов к полету.
- Состояние Disarmed – моторы не вращаются, коптер не реагирует на стик газа.
По умолчанию коптер находится в состоянии Disarmed и переходит в него в случае если вы долго не взлетаете.
Для перевода коптера в состояние Armed есть несколько способов:
С помощью стика – переведите левый стик вниз вправо и подождите пару секунд.

С помощью тумблера – состояния Armed/Disarmed можно настроить на один из тумблеров. Подробнее о настройке в смотрите в статье про полетные режимы.
- С помощью QGC – вы можете заармить ваш дрон программно. Для этого нажмите на надпись Disarmed в шапке и выберите другое состояние.
- С помощью программы - коптер может перейти в состояние Armed, если в навигационной команде, такой как
navigate,set_positionи т.д., указан параметрauto_arm=True.
Kill switch
При активации тумблера Kill Switch на моторы перестают посылаться сигналы управления, и моторы перестают вращаться. Эта функция используется в крайних случаях, к примеру, если вы потеряли управление над коптером.
Будьте внимательны, Kill Switch не переводит коптер в состояние Disarmed!
Перед отключением Kill Switch убедитесь, что стик газа находится в нижнем положении и коптер находится в состоянии Disarmed. В случае, если стик газа не находится в нижнем положении, при отключении Kill Switch на моторы будет подан сигнал соответствующий положению стика в данный момент, что приведет к резкому рывку коптера.