Олимпиада НТИ 2020 – Летательная робототехника (P4DF2)
Решение задания командного зачёта на финале Олимпиады НТИ 2020 по треку Летательная робототехника командой P4DF2.
Авторы
Команда P4DF2:
- Игорь Сидорин (@maerans)
- Даниил Руфин (@Daniil_P4R)
Описание задачи финала
Глобальные эпидемии всегда застают человечество врасплох, и заставляют менять привычный образ жизни. Но в этот раз на борьбу с распространением вируса встали современные технологии! На фоне эпидемии в Китае начали использовать дроны, которые патрулируют улицы и отчитывают прохожих, которые гуляют, не надевая защитную маску, а также повсеместно доставляют медикаменты.
Пока тесты на наличие вируса только начинают массово распространяться, а вакцина от вируса находится в разработке – самое время задуматься о том, как быстро и безопасно производить распространение вакцины. Помочь в этом смогут, конечно же, дроны.
Своевременное выявление вируса у жителей планеты и вакцинация позволит спасти тысячи жизней. Так, на финале участникам предлагается проработать решение для БПЛА и используя БПЛА. Используя БПЛА, разработать решение для следующих задач:
- Получение данных о наличии людей на улицах (камеры в общественных местах позволяют определить места массового скопления людей, а сервер передать БПЛА координаты мест, где они находятся).
- Выявление заболевших среди прохожих. Определение людей с повышенной температурой (зависит от цвета объекта расположенного под коптером, это зелёный, жёлтый или красный цвет). Обеспечение заболевших людей экспресс-тестами.
- Обработка информации, собранной в пункте 2.
- Сбор результатов экспресс-теста (для этого мы используем QR-коды) на наличие вируса и возвращение БПЛА на точку взлета.
Программная часть
Для распознавания QR-кодов мы использовали библиотеку pyZBar. Она уже установлена в последнем образе для Raspberry Pi.
Скрипт будет занимать 100% процессора. Для искусственного замедления работы скрипта можно запустить throttling кадров с камеры, например, в 5 Гц (main_camera.launch):
<node pkg="topic_tools" name="cam_throttle" type="throttle"
args="messages main_camera/image_raw 5.0 main_camera/image_raw_throttled"/>
Топик для подписчика в этом случае необходимо поменять на main_camera/image_raw_throttled.
Для распознавания цвета мы использовали OpenCV.
Проблемы
Обратите внимание:
- Пока коптер не увидит QR-код, он не полетит дальше.
- На распознание цвета влияет освещение, поэтому желательно избавиться от солнечного света в помещении, так как солнечный свет делает изображение с неправильной цветопередачей.

Код
from __future__ import print_function
import rospy
import cv2 as cv
from clever import srv
from std_srvs.srv import Trigger
from cv_bridge import CvBridge
from sensor_msgs.msg import Image
from clever.srv import SetLEDEffect
from pyzbar.pyzbar import decode as qr_read
from threading import Thread
# inits
rospy.init_node('flight')
bridge = CvBridge()
# proxys
set_effect = rospy.ServiceProxy('led/set_effect', SetLEDEffect)
get_telemetry = rospy.ServiceProxy('get_telemetry', srv.GetTelemetry)
navigate = rospy.ServiceProxy('navigate', srv.Navigate)
navigate_global = rospy.ServiceProxy('navigate_global', srv.NavigateGlobal)
set_position = rospy.ServiceProxy('set_position', srv.SetPosition)
set_velocity = rospy.ServiceProxy('set_velocity', srv.SetVelocity)
set_attitude = rospy.ServiceProxy('set_attitude', srv.SetAttitude)
set_rates = rospy.ServiceProxy('set_rates', srv.SetRates)
land = rospy.ServiceProxy('land', Trigger)
# pubs
color_debug = rospy.Publisher("/color_debug", Image)
qr_debug = rospy.Publisher("/qr_debug", Image)
def lenta():
print('blink purple')
set_effect(effect='blink', r=255, g=0, b=255)
rospy.sleep(5)
set_effect(r=0, g=0, b=0)
print('blink off')
def lenta_r():
print('blink red')
set_effect(effect='blink', r=255, g=0, b=0)
rospy.sleep(5)
set_effect(r=0, g=0, b=0)
print('blink off')
def check_temp(data):
global cap # var for waiting the capture
frame = bridge.imgmsg_to_cv2(data, 'bgr8')[80:160, 100:220] # get frame
hsv = cv.cvtColor(frame, cv.COLOR_BGR2HSV)
# get binarized images in each color
red = cv.inRange(hsv, (165, 70, 158), (255, 209, 255))
yellow = cv.inRange(hsv, (10, 80, 88), (49, 220, 225))
green = cv.inRange(hsv, (26, 28, 60), (135, 162, 225))
# count non-zero pixels
color = {'r': cv.countNonZero(red),
'y': cv.countNonZero(yellow),
'g': cv.countNonZero(green)}
temperature[n] = max(color, key=color.get) # get max key
print(n, color, ' ', temperature[n])
# draw circle in centor of colored spot (only need color)
try:
if temperature[n] == 'r':
moments = cv.moments(red, 1) # get moments for find the center
dM01 = moments['m01']
dM10 = moments['m10']
dArea = moments['m00']
x = int(dM10 / dArea)
y = int(dM01 / dArea)
cv.circle(frame, (x, y), 5, (0, 0, 255), -1) # draw
if temperature[n] == 'y':
moments = cv.moments(yellow, 1)
dM01 = moments['m01']
dM10 = moments['m10']
dArea = moments['m00']
x = int(dM10 / dArea)
y = int(dM01 / dArea)
cv.circle(frame, (x, y), 5, (0, 255, 255), -1)
if temperature[n] == 'g':
moments = cv.moments(green, 1)
dM01 = moments['m01']
dM10 = moments['m10']
dArea = moments['m00']
x = int(dM10 / dArea)
y = int(dM01 / dArea)
cv.circle(frame, (x, y), 5, (0, 255, 0), -1)
except ZeroDivisionError:
print('zero')
color_debug.publish(bridge.cv2_to_imgmsg(frame, 'bgr8')) # publish to topic (for web-video-server)
# led and print if covid
if max(color, key=color.get) == 'y' or max(color, key=color.get) == 'r':
t = Thread(target=lenta)
t.daemon = True
t.start()
print('sbrosheno')
# unsubscribe from topic (get only one capture)
image_sub.unregister()
cap = True
def qr_check(data):
global cap
frame = bridge.imgmsg_to_cv2(data, 'bgr8')
barcodes = qr_read(frame) # read the barcode using zbar
if barcodes:
print(barcodes[0].data)
# draw rect and publish to topic
(x, y, w, h) = barcodes[0].rect
cv.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 3)
qr_debug.publish(bridge.cv2_to_imgmsg(frame, 'bgr8'))
if barcodes[0].data == 'COVID - 19' or barcodes[0].data == 'COVID - 2019':
t = Thread(target=lenta_r)
t.daemon = True
t.start()
cap = True
image_sub.unregister()
# coords of each point
coords = {1: [0.295, 0.295, 1],
3: [0.295, 0.885, 1],
5: [0.295, 1.475, 1],
7: [0.295, 2.065, 1],
9: [0.59, 2.655, 1],
8: [0.885, 2.065, 1],
6: [0.885, 1.475, 1],
4: [0.885, 0.885, 1],
2: [0.885, 0.295, 1]}
# dict for temperatures
temperature = {}
# copter's way
path = [1, 3, 5, 7, 9, 8, 6, 4, 2]
# take off
print()
print('take off')
navigate(x=0, y=0, z=1.5, speed=0.5, frame_id='body', auto_arm=True)
rospy.sleep(1.3)
telem = get_telemetry(frame_id='aruco_map')
navigate(x=telem.x, y=telem.y, z=1.5, frame_id='aruco_map')
rospy.sleep(13)
# go using our way
for n in path:
cap = False
print()
print('flight to', n, coords[n])
navigate(x=coords[n][0], y=coords[n][1], z=coords[n][2], frame_id='aruco_map') # go to point
rospy.sleep(4)
image_sub = rospy.Subscriber('main_camera/image_raw', Image, check_temp, queue_size=1) # get capture
while not cap: # wait the capture
rospy.sleep(0.5)
rospy.sleep(3)
# home
print()
print('flight to home')
navigate(x=0, y=0., z=1.5, frame_id='aruco_map')
rospy.sleep(4)
print('land')
land()
print()
print(temperature)
print()
print('wait 2m')
rospy.sleep(120)
# take off
print()
print('take off')
navigate(x=0, y=0, z=1.5, speed=0.5, frame_id='body', auto_arm=True)
rospy.sleep(1.3)
telem = get_telemetry(frame_id='aruco_map')
navigate(x=telem.x, y=telem.y, z=1.5, frame_id='aruco_map')
rospy.sleep(3)
for n in path:
if temperature[n] == 'r' or temperature[n] == 'y': # if was temperatute high or middle
cap = False
print()
print('flight to', n, coords[n])
# flight to this point
navigate(x=coords[n][0], y=coords[n][1], z=coords[n][2], frame_id='aruco_map') # 1
rospy.sleep(3)
image_sub = rospy.Subscriber('main_camera/image_raw', Image, qr_check, queue_size=1) # try to read qr
rospy.sleep(4)
if not cap:
print('spusk')
navigate(x=coords[n][0], y=coords[n][1], z=0.7, speed=0.5, frame_id='aruco_map') # go down for better qr view
while not cap:
rospy.sleep(0.5)
image_sub.unregister() # unsubscribe of topic in each situation
rospy.sleep(3)
else: # it it was good we won't fly there
print()
print(n, 'healthy at first')
# home
print()
print('flight to home')
navigate(x=0, y=0., z=1.5, frame_id='aruco_map')
rospy.sleep(5)
print('land')
land()
Если вы хотите использовать эту программу с другими координатами, то их можно изменить в coords, а последовательность полёта по ним, задать в
path.
Инженерная часть
Все чертежи, модели и программу для тестирования можно найти в архиве.
Наименование выполняемых работ
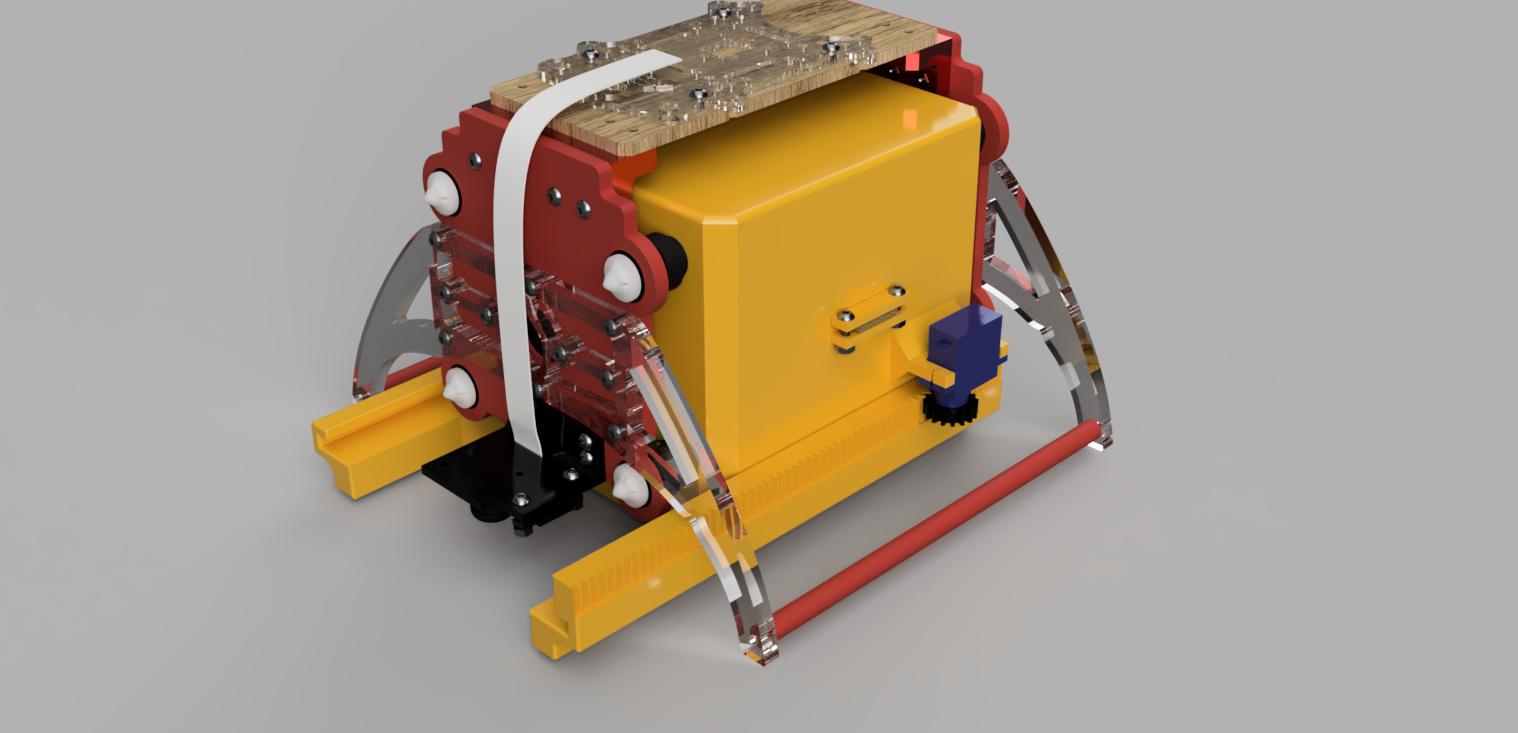
Разработка дополнительного, модульного устройства для транспортировки и доставки хрупкого, малогабаритного груза (экспресс-теста).
Цель выполнения работ
Цель выполнения работ – расширение функциональных возможностей программируемого квадрокоптера “COEX Клевер 4 Code”, при помощи устройства транспортировки груза, для возможности оперативной, бесконтактной доставки квадрокоптером экспресс-тестов и вакцины. Целевая аудитория – скорая помощь, эпидемиологи, МЧС, лица с риском заболевания.
Минимальные требования к устройству
- Модульность;
- возможность изготовления посредством 3D печати;
- возможность осуществления сборки устройства посредством винтового/шпоночного соединения;
- способность вмещать/захватывать груз 10x10x10 см., весом не менее 200 г.;
- возможность транспортировки хрупкого груза при помощи данного устройства;
- возможность реализации бесконтактной доставки груза, не нарушая его целостности, при помощи данного устройства;
- совместимость с программируемым квадрокоптером “COEX Клевер 4 Code”;
- возможность монтажа на нижнюю деку.
Инструкция по созданию устройства
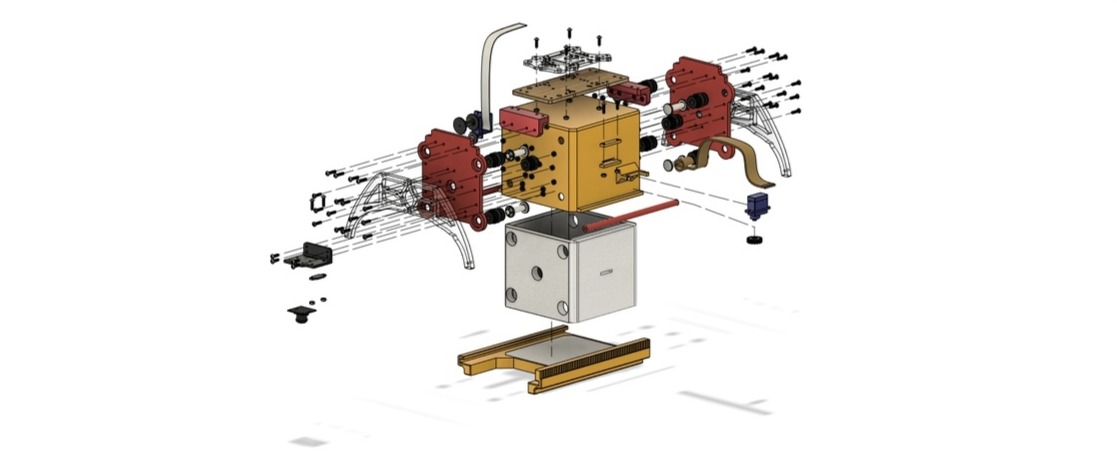
3D-Печать
1. Боковое крепление блока
Функция: Крепление. Материал: PLA/ABS (или аналог). Линии стенки 2. Заполнение 10%. Количество: 2шт. Примечание: Можно вырезать на лазере или на фрезере.
2. Демпфер
Функция: Амортизация. Материал: TPU/FLEX (или аналог). Заполнение 100%. Количество: 10шт.
3. Штифт
Материал: PLA/ABS(или аналог). Заполнение 100%. Количество: 8шт. Примечания: Вы можете купить их отдельно.
4. Крышка штифта
Материал: PLA/ABS(или аналог). Заполнение 100%. Количество: 8шт. Примечания: Вы можете купить их отдельно.
5. Крепления камеры
Функция: Крепление камеры и датчика к захвату груза. Материал: PLA/ABS(или аналог). Заполнение 100%. Количество: 1шт.
6. Крышка
Функция: Подвижная крышка захвата. Материал: PLA/ABS (или аналог). Линии стенки 2. Заполнение 10%. Количество: 1шт.
7. Внутренний куб
Функция: Основная часть захвата в которую помешается груз. Материал: PLA/ABS (или аналог). Линии стенки 2. Заполнение 10%. Количество: 1шт.
8. Распорка
Функция: Помогает удерживать ножки. Материал: PLA/ABS (или аналог). Заполнение 50%. Количество: 2шт. Примечание: Лучше использовать деревянный пруток. Высверлив в нем с двух сторон отверстия под винты м3.
9. Катушка
Функция: Для затягивания ленты. Материал: PLA/ABS (или аналог). Заполнение 100%. Количество: 1шт.
10. Шестерня
Функция: Насадка на сервопривод для открытия крышки. Материал: PLA/ABS (или аналог). Заполнение 100%. Количество: 1шт.
11. Уголки
Функция: Соединение между верхнем креплением и боковым креплением . Материал: PLA/ABS (или аналог). Заполнение 50%. Количество: 2шт.
Лазерная резка
1. Верхнее крепление
Функция: Переходное крепления захвата. Материал: Дерево 4мм. Количество: 1шт.
2. Боковое крепление
Функция: Переходное крепления захвата. Материал: Дерево 5мм. Количество: 2шт.
3. Ножка левая
Функция: Опорный элемент. Материал: Поликарбонат 6мм. Количество: 2шт.
4. Ножка правая
Функция: Опорный элемент. Материал: Поликарбонат 6мм. Количество: 2шт.
5. Зажим ремня
Функция: Зажим ремня. Материал: Поликарбонат 3мм.
Дополнительные материалы и устройства
Крепеж
- Винт M3-12mm - 28
- Винт M3-14mm - 8
- Винт M3-10mm - 8
- Винт M2-8mm - 1
- Винт M2-6mm - 4
- Гайка 3mm - 44
- Гайка 2mm - 4
Оборудование
- Лента тканевая ширина 18мм. Примечание- можно использовать любой кусок ткани порезанный на полоски толщиной в 18мм. Длина - 30см.
- Штифт и крышка для него. Количество - 8шт.
- Монолитный поликарбонат прозрачный. размер листа - 200 мм × 200 мм × 6 мм
- Поролон толщиной 10мм. Примечание - можно просто обрезать бытовую губку по нужным размерам.
- Сервоприводы Feetech FS90R 360 degrees. Количество - 2шт.
- Демпфер 17.5x7x20mm. Количество - 10шт.
Сборка
Теперь когда у вас есть все нужные части захвата, можно начинать сборку. Все винтовые соединения рекомендуется фиксировать с помощью синего loctite.
- В первую очередь нужно вырезать из губки или поролона прокладки подходящие по размеру. Для этого можно напечатать на листе А4 приложенный чертеж и аккуратно вырезать деталь.
- Далее при помощи клея четыре губки вклеиваются внутрь куба как показано на чертеже.
- Оставшиеся губка вклеивается в крышку.
- При помощи гаек, винтов м3-12мм прикручиваем ножки к боковым креплениям
- Крепление камеры прикрутить к боковому креплению как показано на чертеже. Теперь это будет передняя часть захвата.
- Прикрутите уголки к боковым пластинам используя винты 14мм.
- Вставьте демпферы в специализированные отверстия центрального куба.
- Закрепите на демпферах боковые пластины
- Закрепите демпферы при помощи штифтов (проденьте штифт в демпфер с внутренней стороны и закрепите его крышечкой)
- Проденьте ленту через куб закрепив в зажиме.
- Проденьте ленту в катушку и прихватите клеем.
- Прикрутите сервопривод с катушкой к специальному креплению как показано на чертеже. И вкрутите винт м2 с другой стороны.
- Прикрутите ко второму сервоприводу шестерню.
- Присоедините крышку к кубу.
- Прикрутите второй сервопривод к специальному креплению.
- Прикрепите камеру и датчик высоты.
- Прикрепите нижнюю пластину Клевера к верхней пластине захвата.
- Прикрутите верхнюю пластину к уголкам.
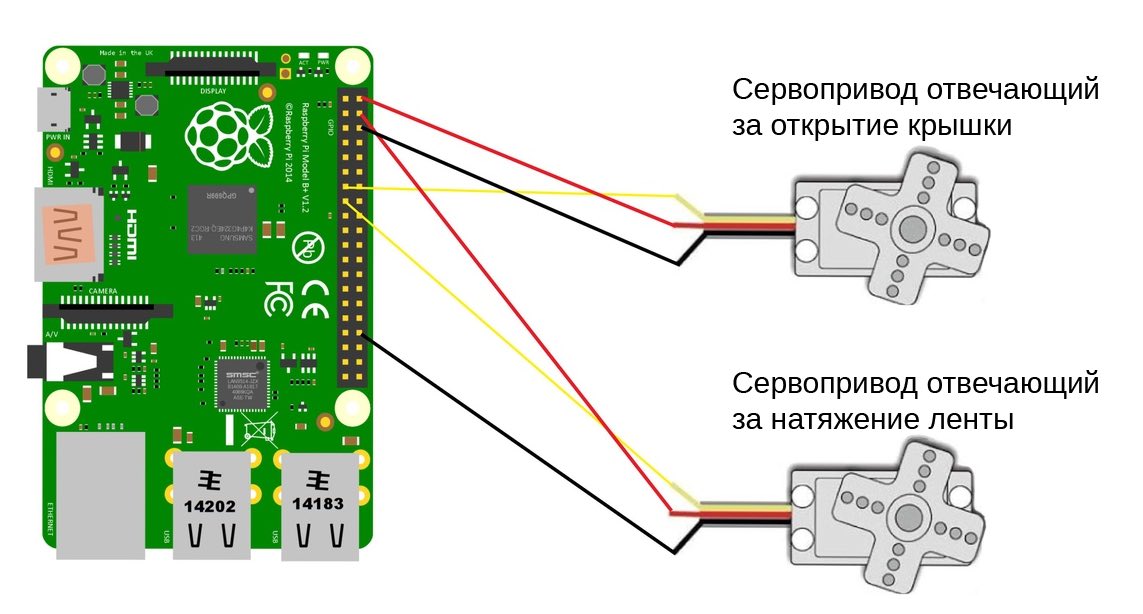
- Подключите сервоприводы. Красные провода подключаем к 5V, черные к GND, сигнальный провод от сервопривода, отвечающего за открытие крышки к GPIO27, а сервопривод отвечающий за натяжение ленты к GPIO22.
Если вы хотите использовать захват при полете в автономном режиме, то следует поменять параметры в main_camera.launch на следующие:
<node pkg="tf2_ros" type="static_transform_publisher" name="main_camera_frame" args="0.102 0 -0.175 1.5707963 0 3.1415926 base_link main_camera_optical"/>