EasyToFly
Информация о команде
CopterHack-2021, название команды: EasyToFly.
В команде 5 человек:
- Игорь Сидорин @maerans12 (TeamLead)
- Артём Баталов @bart02 (Full-Stack разработчик)
- Карина Янышевская @fanot (Веб-разработчик)
- Никита Локтев @nikilokser (Специалист отдела Hard)
- Даниил Руфин (Специалист отдела Hard)
E-mail: a@batalov.me
Telegram: @bart02, @maerans
Введение
В работе рассматривается процесс разработки образовательного аппаратно-программного комплекса (далее – АПК, система) для безопасного обучения специалистов по профилю "Летающая робототехника".
Основной проблемой данной сферы является недостаточная безопасность открытых систем беспилотных летательных аппаратов (далее – БПЛА), а также сложность в их управлении и программировании для использования в обучении, промышленности и т.д.
Объектом проектной работы являются учебные комплексы для изучения процессов автоматизации. Предметом является АПК для безопасного обучения специалистов по профилю "Летающая робототехника".
Цель: Разработка АПК для простого и безопасного обучения специалистов по профилю "Летающая робототехника".
Задачи:
- Проведение исследования среди потенциальных потребителей об их необходимостях при обучении специалистов.
- Проведение анализа существующих решений.
- Разработка технического задания (далее – ТЗ) на АПК.
- Изучение литературы, необходимой для реализации проекта.
- Формирование команды исполнителей на основании технического задания.
- Разработка программной подсистемы АПК «Предотвращение столкновений».
- Разработка программной подсистемы АПК «Мастер первоначальной настройки БПЛА».
- Разработка программной подсистемы АПК «Монитор состояния БПЛА».
- Разработка аппаратной составляющей АПК.
![]()
Выбор платформы
Платформа Clover 4 позволяет подключать дополнительные устройства и обеспечивать связь между ними и оборудованием на борту; а также тем, что программная архитектура данного набора основана на открытом полетном стеке PX4 и операционной системе для роботов ROS (далее – ROS), что предоставляет возможность ее использования в том числе и на других беспилотных летательных аппаратах, в которых используется такие же программные компоненты. После изучения рынка образовательных дронов в России, мы пришли к выводу, что данная платформа станет хорошим стартом разработки проекта.
Опрос потенциальных заказчиков. Разработка ТЗ
По результатам опроса потенциальных потребителей системы – педагогов детского технопарка «Кванториум» и других ОУ, было выяснено, что многие учреждения не имеют специально оборудованных зон для полетов, вследствие чего обучающиеся проводят настройку БПЛА и, в редких случаях, полет только под присмотром руководителя, на котором лежит ответственность за аппарат и окружающие предметы, жизнь и здоровье обучающихся.
Также нам стало известно о сложностях при настройке автономного полета, из-за частого использования консоли операционной системы Linux в процессе настройки, а также необходимости установки дополнительных программ.
Помимо этого, одним из запросов была компактная аппаратная составляющая системы, которая представляет собой защищенный корпус БПЛА, с возможностью быстрой установки используемого оборудования.
В качестве рассмотрения возможного места пилотного запуска системы, были проведены переговоры с Кванториумом г. Томска, об использовании АПК в обучающем процессе Аэроквантума.
Процесс разработки
Программная подсистема «Предотвращение столкновений»
Первым приоритетом стала программная подсистема «Предотвращение столкновений». Создав систему автономной защиты от “влетания” БПЛА в предметы, стоящие в учебной аудитории как во время ручного управления, так и тестировании программ автономного полета, а, при необходимости, и облета препятствий, мы сможем организовать более безопасное и продуктивное обучение.
Для разработки данной подсистемы, нами была изучена документация полетного стека PX4. Было выяснено, что полетный контроллер поддерживает эту функцию при передаче физически и геометрически обработанных данных с компьютера на борту. На борту Clover 4 установлен микрокомпьютер Raspberry Pi (далее – микрокомпьютер, компьютер на борту), мощности которого будут использоваться для этих целей.
Далее встал вопрос об использовании датчиков для разработки данной подсистемы.
LIDAR
Первое, что приходит в голову при разработке подобной системы – круговые LIDAR-датчики (далее – лидар). Самым популярным похожим решением на сегодняшний день является RPLIDAR A1.
Датчик основан на принципе лазерной триангуляции и использует высокоскоростное оборудование для получения и обработки изображений, система измеряет данные о расстоянии более 8000 раз в секунду. Лидар вращается по часовой стрелке для выполнения всенаправленного лазерного сканирования окружения на 360 градусов.
Результатом является облако точек, которое можно использовать при дальнейшей работе с пакетами ROS, позволяющими производить действия с этой структурой данных (такие как: перевод в другие структуры данных, построение карты, передача данных на другое оборудование).
Для установки датчика на Clover 4 было разработано и подготовлено для печати на 3D принтере специальное крепление, которое для экономии высоты было совмещено с креплением для аккумулятора.
Далее предстояла разработка программного обеспечения, которое выполняло все преобразования, как типов данных, так и геометрии (соглашения о системах координат полетного контроллера и ROS отличаются). После этого обработанные данные направляются в полетный контроллер, который отвечает за принятие решения: остановить летящий БПЛА или продолжать полет.
Аппаратное решение из 4-х лазерных дальномеров
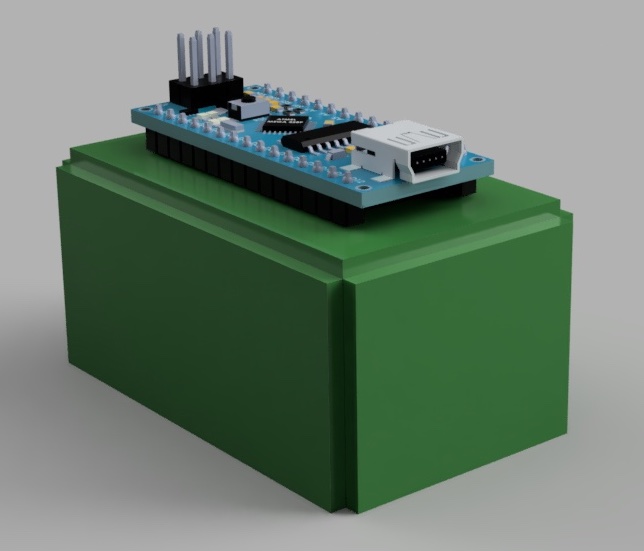
Помимо лидара, было принято решение использовать статические дальномеры для удешевления системы. Нами было разработано аппаратное решение на базе Arduino Nano и дальнедистанционных датчиков времени пролета VL53L1X. Изделие совместимо с разработанным нами креплением.
Далее было написано программное обеспечение для работы с оборудованием. Было необходимо передать данные с микроконтроллера, установленного на Arduino Nano на микрокомпьютер, представить показания с датчиков в том же виде, в котором они представлены при получении данных с лидара. И после этого произвести те же действия, что и с лидаром.
Программная подсистема «Мастер первоначальной настройки БПЛА»
Нами была запланирована разработка еще одной программной подсистемы, которая позволит настроить БПЛА, используя единый пользовательский веб-интерфейс, который «проведет» пользователя через весь процесс настройки. Также в данный веб-интерфейс должен быть встроен монитор текущего состояния БПЛА и редактор настроек.
В первую очередь нами был сделан каркас будущего интерфейса.
Также на данный момент реализован интерфейс калибровки датчиков БПЛА со встроенной анимацией для удобной работы с ним. Работу интерфейса калибровки можно увидеть на видео.
Аппаратная составляющая АПК
Также перед нами стояла задача разработать защищенный корпус БПЛА, с возможностью быстрой установки используемого оборудования, который не будет готов к полету и обучающимся не будет необходимости его собирать. На данный момент готова конструкторская документация изделия, а само изделие проходит апробацию.
Использование нашего продукта
Репозиторий проекта доступен по ссылке https://github.com/easy-to-fly/easy-to-fly.
Сборка крепления для датчиков
Вам понадобится:
- 4x стойки M3x26
- 1x крепление для батареи
- 1x платформа для крепления
Соедините всё как показано на модели.
Сборка системы из 4-х лазерных дальномеров
Вам понадобится:
- 4x дальнедистанционный датчик времени пролета VL53L1X
1x Arduino Nano
Разведите платы согласно развертке из файлов (вы можете использовать http://gerbv.geda-project.org/ для открытия)
- Припаять пины для установки Arduino Nano и датчиков на каждую из плат.
Расположить платы как показано на развёртке.
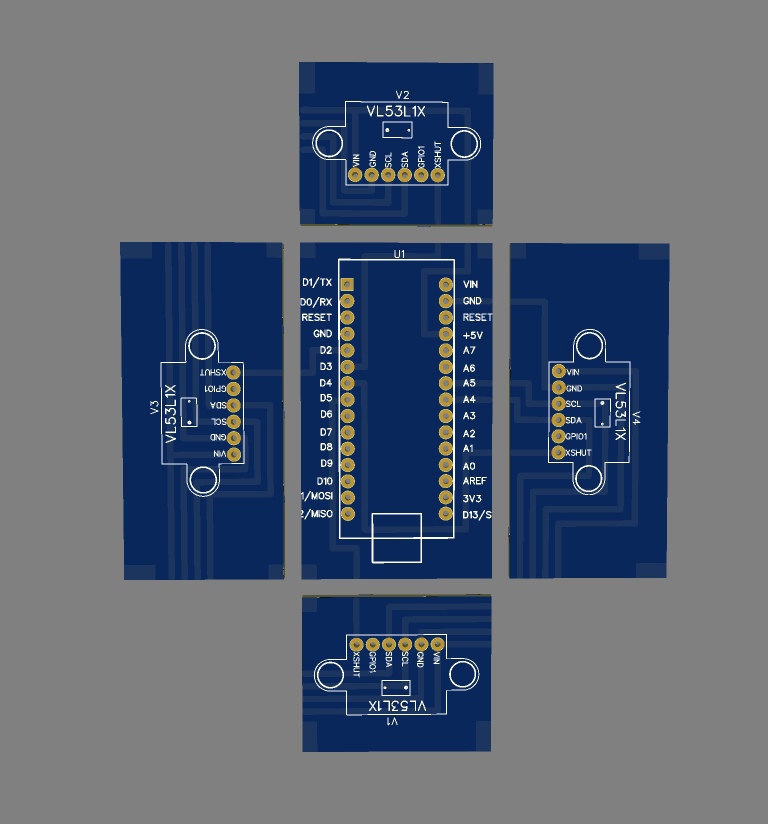
Составить из плат параллелепипед.
- Спаять все платы между собой по соответствующим контактным группам.
- Установить в пины датчики и Arduino nano.
- Убедиться в отсутствии короткого замыкания.
Установка ПО на Raspberry Pi
В первую очередь необходимо подключить ваш коптер к Интернету, один из способов это сделать - перевести его в режим клиента и подключить в Wi-Fi, имеющему доступ в Интернет.
Склонируйте репозиторий проекта в catkin_ws и перейдите в него:
cd ~/catkin_ws/src
git clone https://github.com/easy-to-fly/easy-to-fly
cd easy-to-fly
Установите необходимые зависимости
./install/ros_deps.sh
./install/arduino_deps.sh # только если собираетесь использовать систему из 4-х лазерных дальномеров
Запуск предотвращения столкновений
Для работы с лидаром необходимо изменить параметр CP_DIST PX4. Рекомендуется установить 0.5 м.
Теперь полетный контроллер будет получать сообщения от компьютера о расстоянии вокруг в специальном формате (читать доп. https://mavlink.io/en/messages/common.html#OBSTACLE_DISTANCE).
Теперь задача заключается в передаче сообщения такого типа на полетный контроллер.
В библиотеке MAVROS есть специальный плагин для этих целей: https://github.com/mavlink/mavros/tree/master/mavros_extras#obstacle_distance.
Таким образом, достаточно ее включить в <rosparam param="plugin_whitelist"> в файле mavros.launch.
Далее, запускаем один из .launch файлов.
Заключение
В ходе выполнения проекта были проанализированы существующие разработки в области образовательной «Летающей робототехники», описаны их достоинства и недостатки. Выбрана платформа для старта проекта.
Реализована и протестирована основная часть проекта – программная подсистема «Предотвращение столкновений». Веб-интерфейс, согласно плану, находится в разработке до конца марта 2021 года.
Для реализации аппаратной составляющей был выполнен сборочный чертеж в системе автоматизированного проектирования Fusion 360. Полученные чертежи позволят производить БПЛА для реализации проекта. В будущем на основе конструкторской документации будут изготовлены дополнительные БПЛА.
В следующие два года планируется совершенствование проекта и выход на рынок. Некоторые из основных задач на 2021-2023 год: более подробное исследование рынка для выделения основных задач дальнейшей разработки системы, апробация системы в целом в Кванториуме, разработка системы навигации БПЛА по карте с использованием оборудования, которое будет установлено на аппаратной составляющей.