Sensor calibration
In order to perform the sensor calibration, select the Vehicle Setup tab and choose the Sensors menu.
If you use the flight controller COEX Pix, and it's installed with servo pins faced backwards, all Autopilot Orientation columns must specify
ROTATION_ROLL_180_YAW_90, otherwise the flight controller will not correctly perceive the tilt and rotation of the copter.
Compass
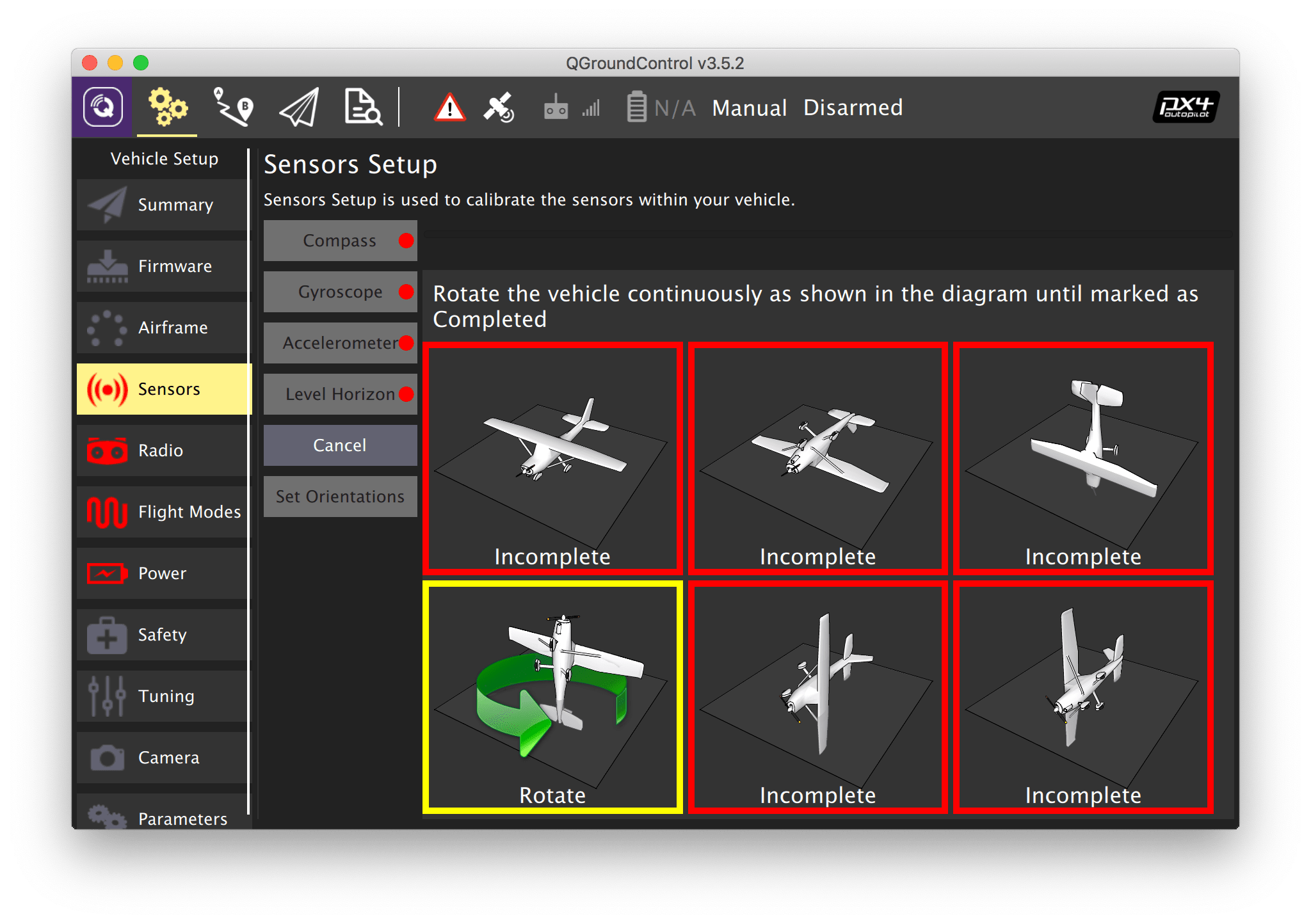
- Select the Compass submenu
- Choose the flight controller orientation (ROTATION_NONE if the arrow on the flight controller is aligned with the arrow on the frame).
- Press OK.
- Put the drone in one of the orientations marked by the red outline and wait for the appropriate outline to turn yellow.
- Spin the drone as required until the outline turns green. Do this for all orientations.
Read more in the PX4 docs: https://docs.px4.io/master/en/config/compass.html.
Gyroscope
- Select the Gyroscope submenu.
- Place the drone on a flat, horizontal surface.
- Press OK.
- Wait for the calibration to finish.s
The drone should stay completely still during the calibration.
Read more in the PX4 docs: https://docs.px4.io/master/en/config/gyroscope.html.
Accelerometer
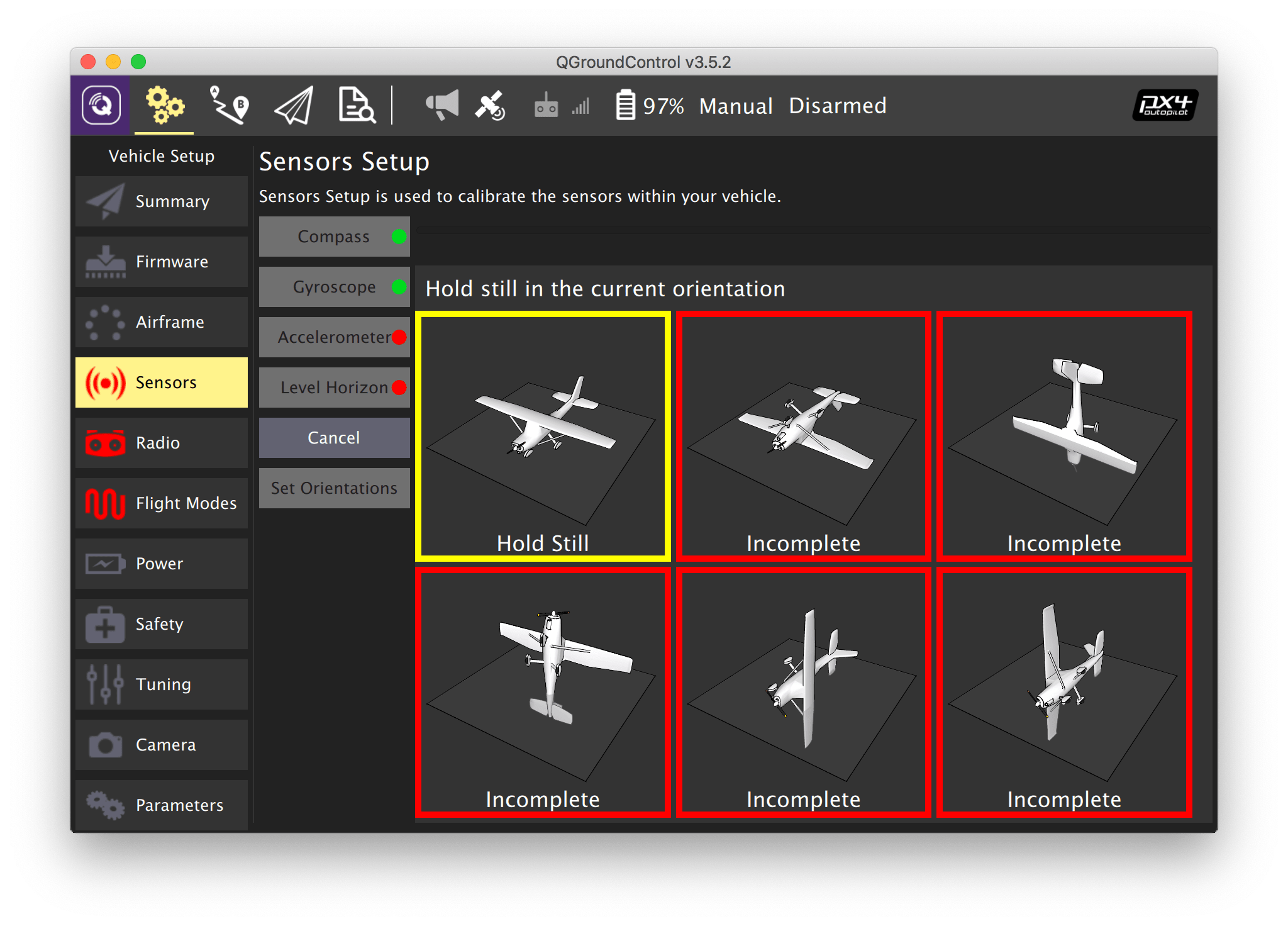
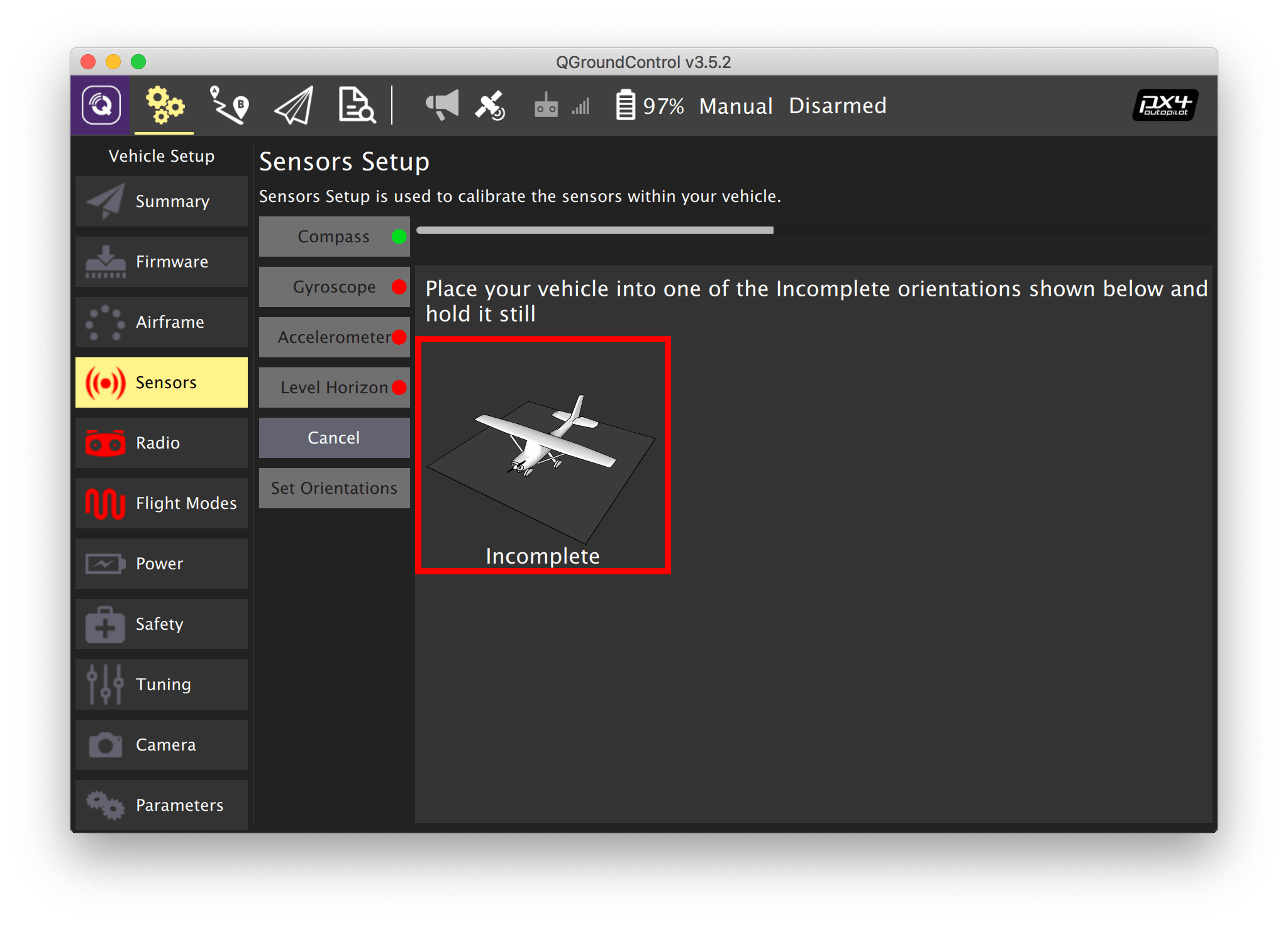
- Select the Accelerometer submenu.
- Choose the flight controller orientation (ROTATION_NONE if the arrow on the flight controller is aligned with the arrow on the frame).
- Put the drone in one of the orientations marked by the red outline and wait for the appropriate outline to turn yellow.
- Hold the drone in this orientation until the outline turns green. Do this for all orientations.
Read more in the PX4 docs: https://docs.px4.io/master/en/config/accelerometer.html.
Level horizon
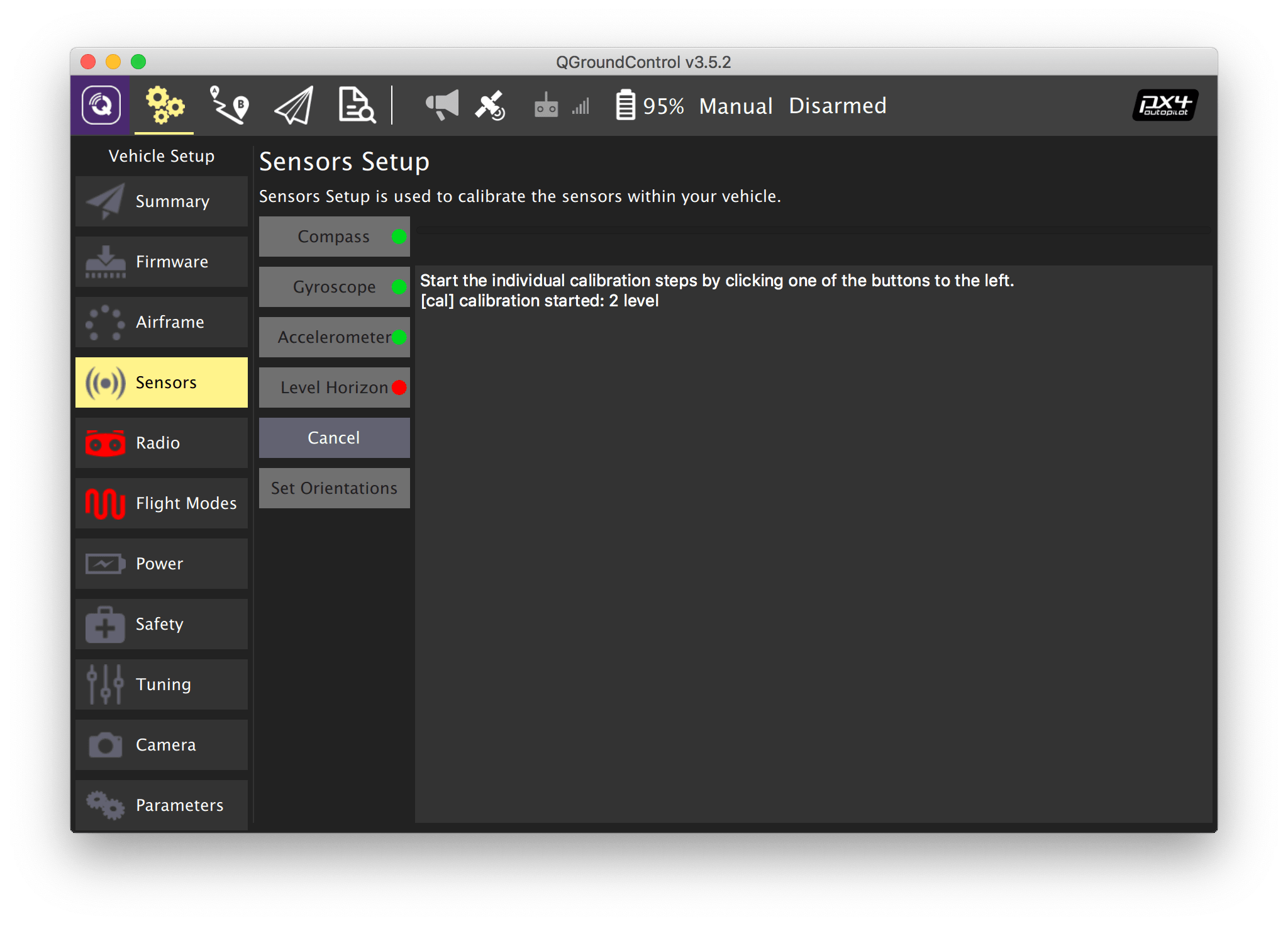
- Select the Level Horizon submenu.
- Choose the flight controller orientation (ROTATION_NONE if the arrow on the flight controller is aligned with the arrow on the frame).
- Place the drone on a flat, horizontal surface.
- Press OK.
- Wait for the calibration to finish.
Read more in the PX4 docs: https://docs.px4.io/master/en/config/level_horizon_calibration.html.
Next: RC setup.