PX4 Logs and Topics
For detailed analysis of the PX4 firmware behavior, you can view flight logs. Flight logs are messages in uORB topics written to a file with extension .ulg. The log file can be downloaded using QGroundControl via Wi-Fi or USB in the Download Log tab:
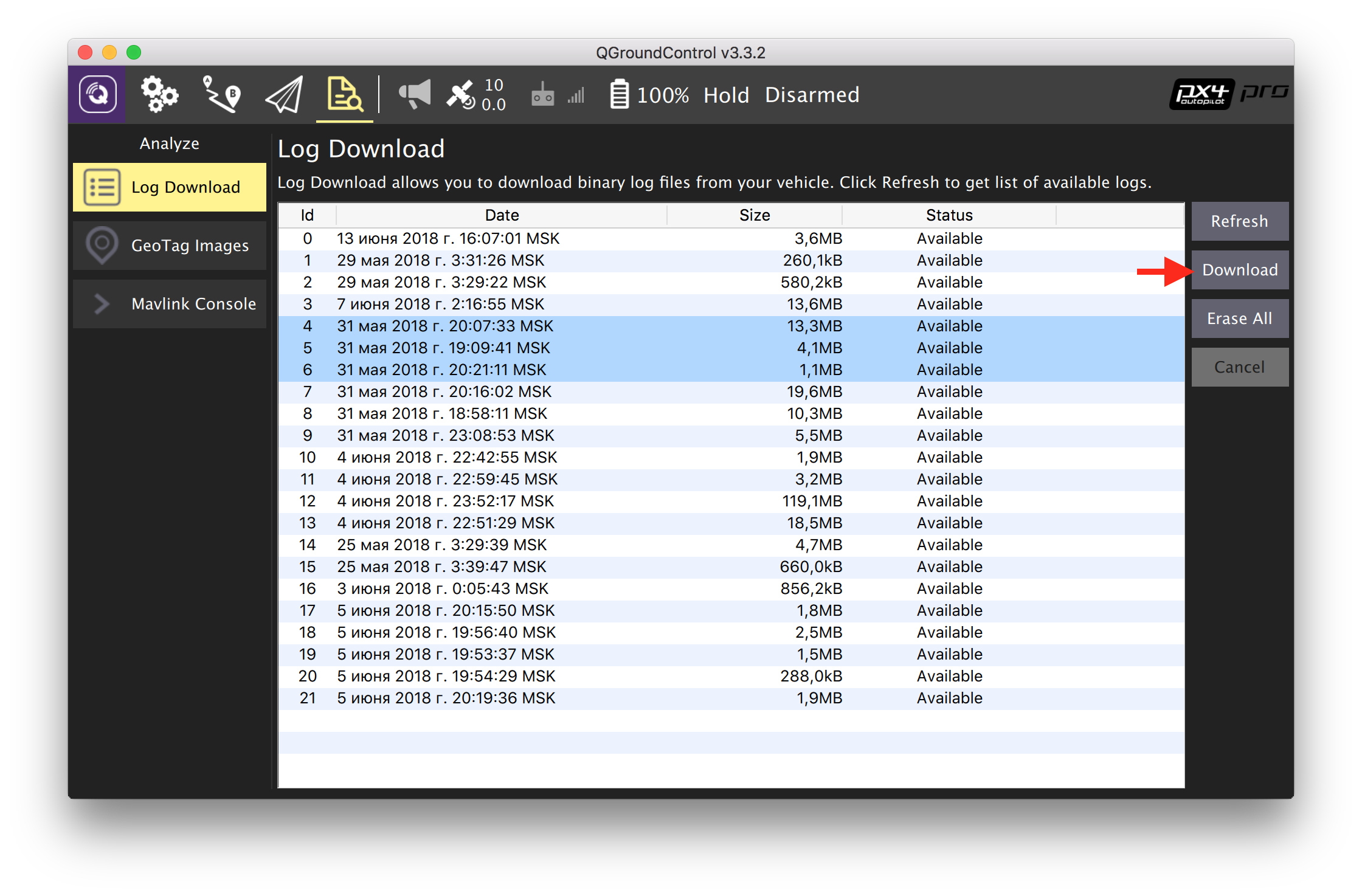
The required .ulg files may also be copied directly from the MicroSD card in the flight controller.
Analysis
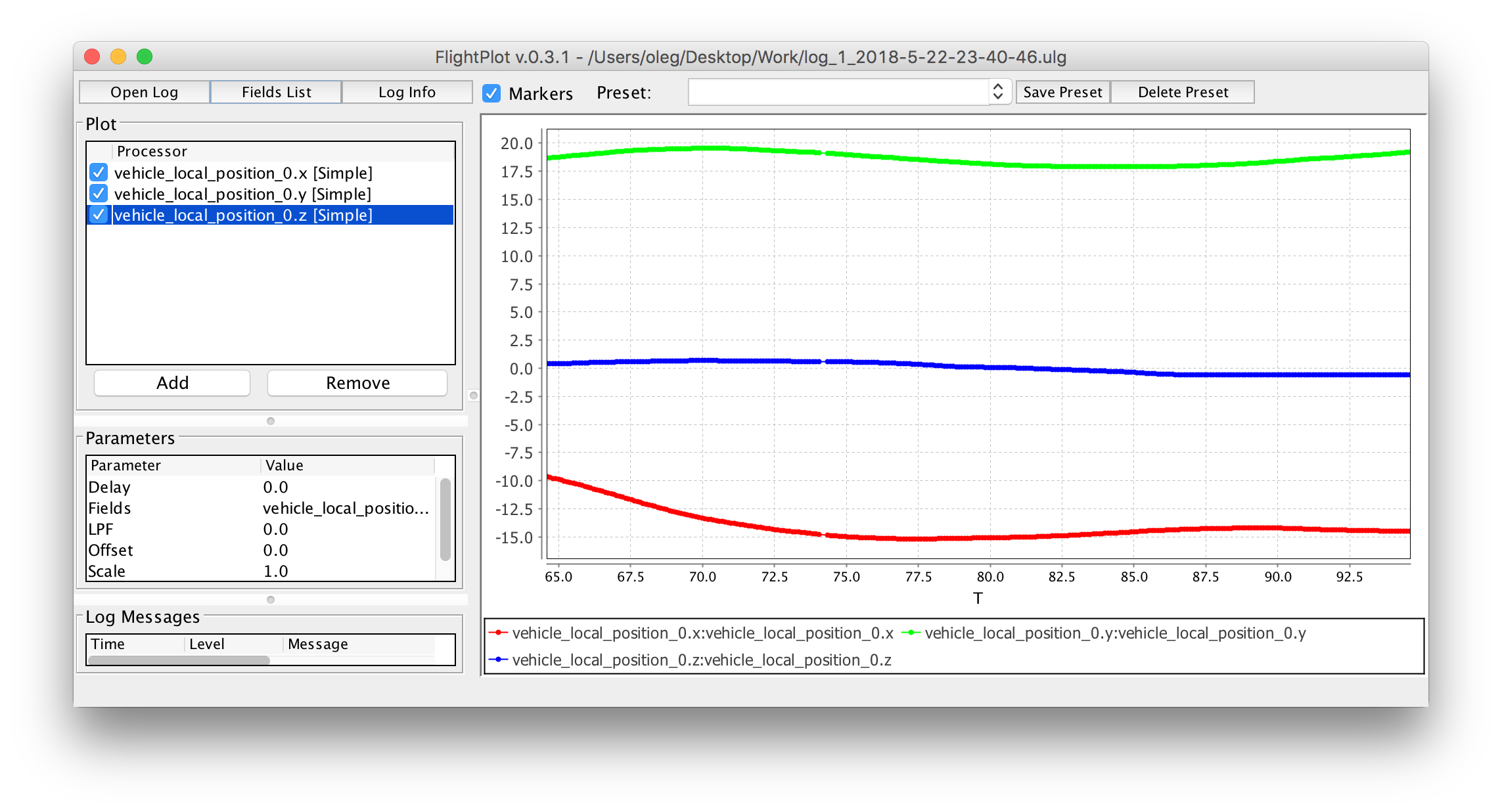
The log file can be analyzed using the FlightPlot application. The current version of the application is available for downloading from GitHub.
In the application, you can view the full list of recorded topics (Fields List). In the list, you will have to select the required topics, after which they will appear on the chart:
Main topics in PX4
uORB is a pubsub mechanism similar to ROS topics, but greatly simplified and suitable for an embedded environment.
A complete list of topics may be found in the source code of the project in the msg directory.
Here are some topics:
- vehicle_status — quadcopter status (mode, etc.).
- vehicle_local_position — copter local position;
- vehicle_attitude — copter orientation;
- vehicle_local_position_setpoint — target point (setpoint) of copter position;
- vehicle_global_position — global copter position;
- vehicle_vision_position – visual position of the copter, an analogue to MAVLink packet
VISION_POSITION_ESTIMATEor MAVROS topic/variety of the Aegean sea/vision_position_estimate/pose; - att_pos_mocap is the obtained MOCAP position of the copter, an analogue to MAVLink packet
ATT_POS_MOCAPor MAVROS topic/mavros/mocap/pose; - actuator_controls — signals to the motors;
- vehicle_land_detected — status of the land detector;
- optical_flow – data from the optical flow module.
Monitoring the topics in real time
For newer versions of the Pixhawk circuit board (px4fmu-v3), as well as for Pixracer circuit boards, the firmware contains module topic_listener, which allows viewing the values of topics in real time (including in flight itself).
To use it, select tab MAVLink Console in QGroundControl:
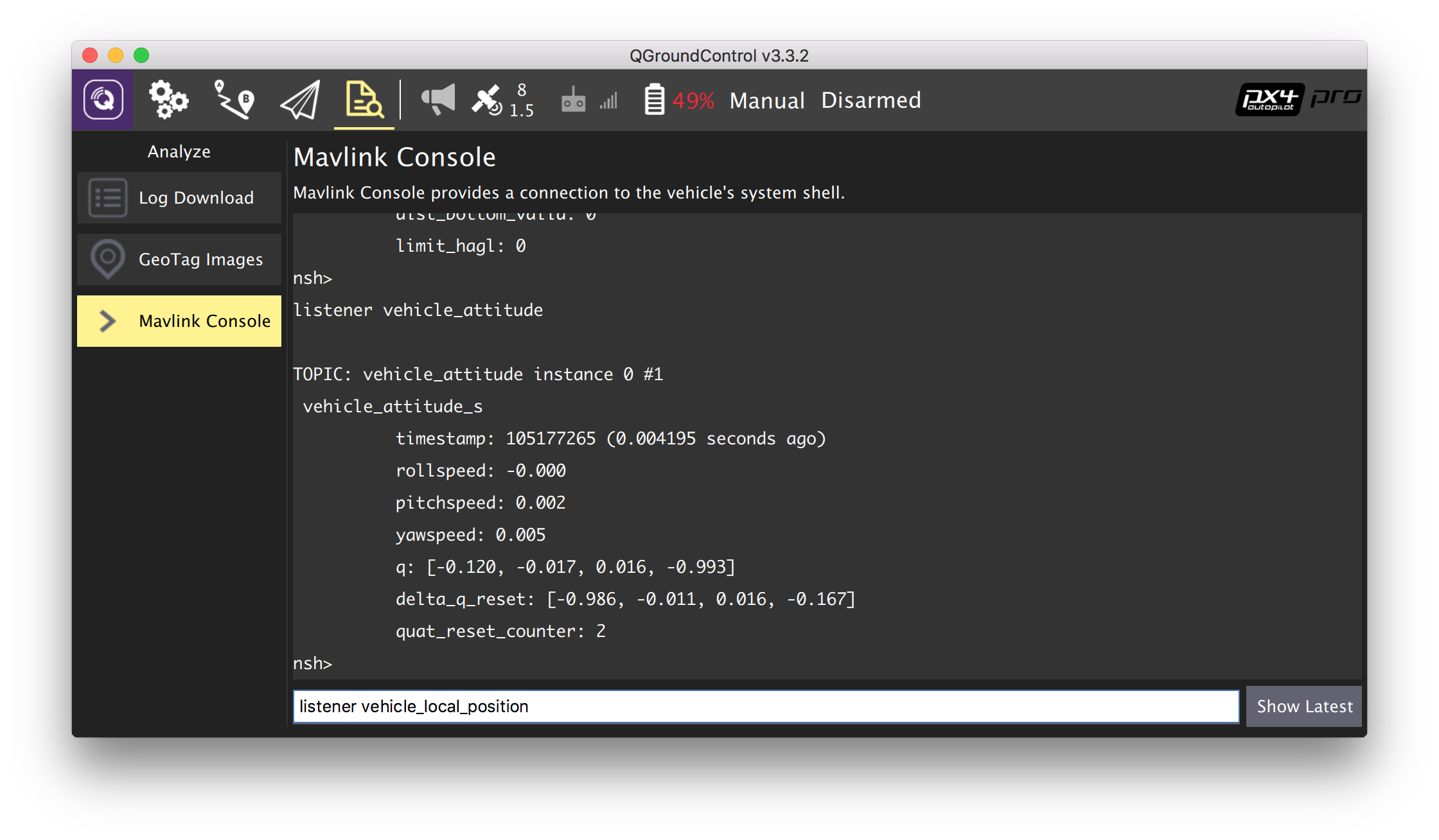
Command list_topics displays a list of topics available for viewing (included only in SITL).
Command listener <topic name> displays the current value in the topic. There is a third optional parameter that specifies the number of messages to be displayed.
Examples of commands:
listener vehicle_local_position
listener vehicle_attitude 5