Flight modes
PX4 mode determines how the vehicle should react to commands and RC signals. Mode changing is usually mapped to one of the RC transmitter sticks.
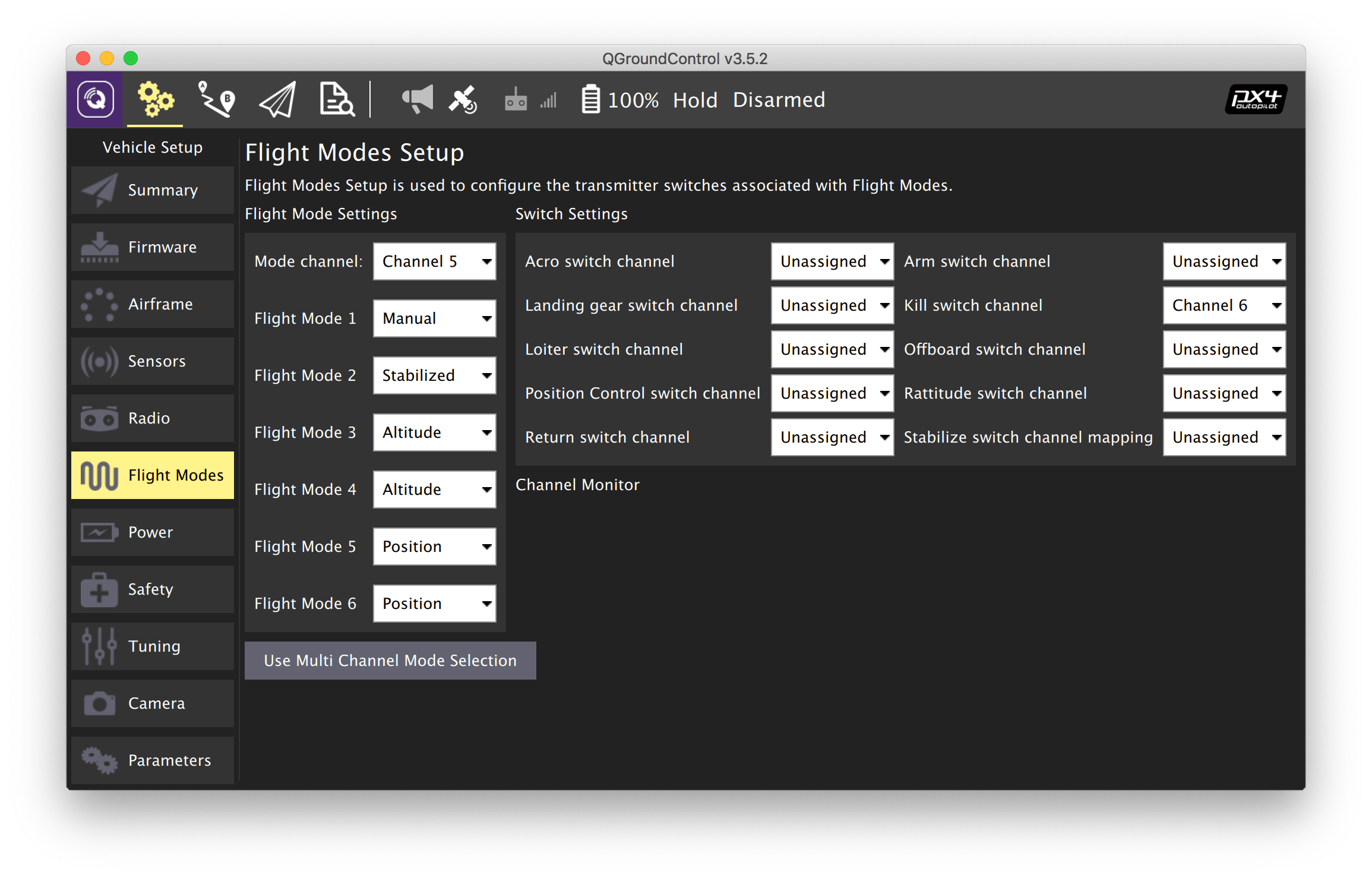
In order to configure flight modes:
- Open the Vehicle Setup panel in QGroundControl.
- Select the Flight Modes menu.
- Set the Mode Channel to the SwC switch (Channel 6).
- Optionally, set the Emergency Kill Switch Channel to SwA switch (Channel 5).
Set desired flight modes.
The following flight modes are recommended:
- Flight Mode 1: Stabilized.
- Flight Mode 4: Altitude.
- Flight Mode 6: Position.
Check mode switching by changing the switch position.
- Choose SwA (Channel 5) as emergency motor stop (Kill switch).
Flight modes description
Manual control
In manual mode the pilot controls the drone directly. GPS, computer vision data, and barometer are not used. Flying in these modes requires good drone piloting skills.
- STABILIZED/MANUAL — the mode with stabilized horizontal orientation. Allows control of the throttle, the copter pitch and roll, and the yaw rate.
- ACRO — control of throttle and the copter's pitch rate, roll rate, and yaw rate. Used by drone racers and in 3D piloting stunt shows.
- RATTITUDE — in the center, the right stick is similar to STABILIZED, at the edges, it passes to the ACRO mode.
Assisted flight modes
- ALTCTL (ALTITUDE) — control of the altitude rate, pitch, roll and yaw angular velocity. Requires a barometer or another altitude source.
- POSCTL (POSITION) — control of the altitude rate, forward/backward and right/left speed, and yaw angular velocity. It is the easiest flying mode. The barometer, GPS, computer vision, and other sensors are used.
Auto flight modes
In autonomous flight modes the quadcopter ignores the control signals from the transmitter and uses a program to fly.
- OFFBOARD mode uses an external computer (like a Raspberry Pi). This mode is used in Clover for autonomous flights.
- AUTO.MISSION – PX4 uses the mission pre-loaded into the drone (the mission is uploaded using ground control station over MAVLink). This mode is commonly used to move in a pre-planned path using GPS as a position source, for example, in photogrammetry.
- AUTO.RTL – the copter automatically returns to the takeoff (launch) point.
- AUTO.LAND – the copter lands at the current position.
Additional information: https://dev.px4.io/en/concept/flight_modes.html.
Next: Power setup.