Copter Hack 2019
The Copter Hack 2019 hackathon took place on the 11th to 13th of October in the "Moscow" Technopolis.
Event page: https://coex.tech/copterhack.
Hackathon chat: https://t.me/CopterHack.
Timepad event page: https://copterexpress.timepad.ru/event/1017592/.
Information for participants
COEX Pix specifics
Be sure to set the Autopilot orientation parameter to ROTATION_ROLL_180_YAW_90 if you're using the COEX Pix flight controller. This parameter should be applied during calibration of each sensor.
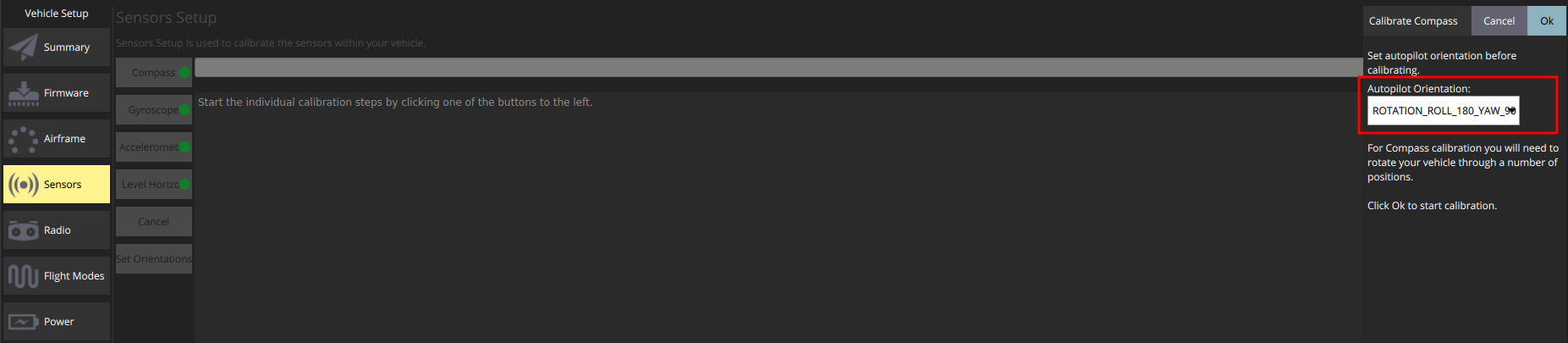
This parameter is used for IMU orientation correction.
Suggested image versions
Raspberry Pi versions 3B+ and lower: v0.18
Raspberry Pi version 4: v0.19-alpha.1
Camera orientation
Some drones have the camera mounted with the cable going forward. You should set this orientation in the main_camera.launch file in the clever package.
Further reading: Camera orientation
Using Optical Flow
In order to enable optical flow set optical_flow and rangefinder_vl53l1x parameters to true in clever.launch.
Enable pub agl as lpos down in LPE_FUSION parameter using QGroundControl.
Make sure the rangefinder is mounted correctly and is working (see Interfacing with a laser rangefinder).
Further reading: Optical Flow.
Using ArUco map
Use the cmit.txt map. See instructions.
Drone batteries
The battery indicator should be connected to the battery at all times. The organizers will not replace your damaged batteries!
Flight videos
Be sure to record ALL your flights on video! If your drone fails before your presentation, you'll be able to at least show your videos.
Yaw problem
The v1.8.2-clever.7 FCU firmware has a potential bug that manifests during VPE (marker-based) flights. If your drone does not correct its yaw when using ArUco markers, try using an older firmware version (v1.8.2-clever.6, available from https://github.com/CopterExpress/Firmware/releases/tag/v1.8.2-clever.6). Download px4fmu-v4_default.px4 for COEX Pix.
navigate service problem
The 0.18 Raspberry Pi image has a potential bug that makes the drone fly through waypoints too fast. Try setting the nav_from_sp parameter to false in ~/catkin_ws/src/clever/clever/launch/clever.launch if you are affected by it:
<!-- simplified offboard control -->
<node name="simple_offboard" pkg="clever" type="simple_offboard" output="screen" clear_params="true">
<param name="reference_frames/body" value="map"/>
<param name="reference_frames/base_link" value="map"/>
<param name="reference_frames/navigate_target" value="map"/>
<param name="reference_frames/navigate_target" value="map"/>
<param name="nav_from_sp" value="false"/>
</node>
Lectures (in Russian)
Lecture 1: Introduction – https://www.youtube.com/watch?v=cjtmZNuq7z0.
Lecture 2: FCU setup – https://www.youtube.com/watch?v=PJNDYFPZQms.
Lecture 3: PX4 architecture – https://www.youtube.com/watch?v=_jl7FImq3jk.
Lecture 4: Autonomous flights – https://www.youtube.com/watch?v=ThXiNG1IzvI.
Be sure to check out other videos on the COEX YouTube channel: https://www.youtube.com/channel/UCeCu93sLBkcgbIkIC7Jaauw/featured.
Results
Winners:
- Bulbolet – potato delivery using a smart hoist.
- Copter don't hurt me – controlling drone using a neural interface.
- import torch – active track using neural networks.
- Autobot – freeze light through a VK bot.
- Stardust Crusaders – AR drone simulation.