COEX Clover
Clover is an educational kit of a programmable quadcopter that consists of popular open source components, and a set of necessary documentation and libraries for working with it.
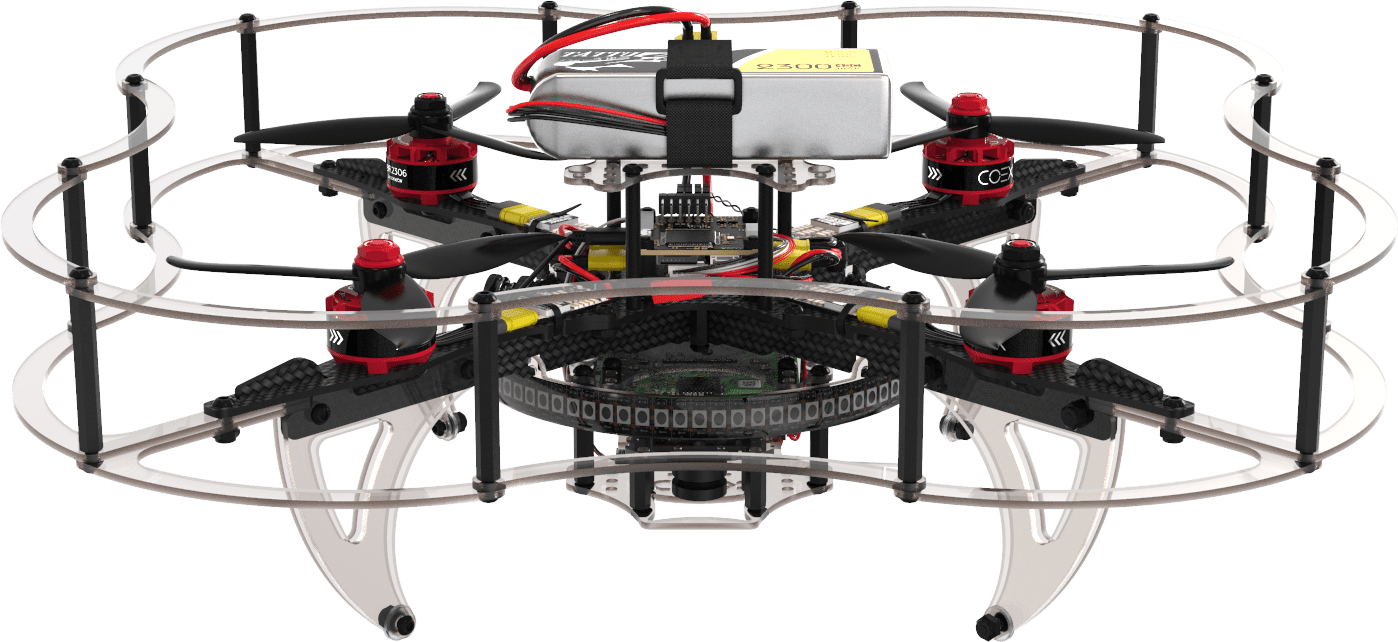
The kit includes a COEX Pix flight controller with the PX4 flight stack, a Raspberry Pi 4 as a controlling onboard computer, and a camera module for performing flights with the use of computer vision, as well as a set of various sensors and other peripherals.
The Clover platform contains a pre-configured image for Raspberry Pi with the full set of required software for working with peripheral devices and programming autonomous flights. The source code of the platform and of the documentation is open and available on GitHub.
If you have studied the documentation but have not found an answer to your question, join our support chat and our specialists will be happy to answer you: @COEXHelpdesk.
We also have a chat for programmers coding for PX4, autonomous navigation indoors, and drone swarms: @DroneCode.
You can download PDF-version of this documentation.