Camera setup
The following applies to image version 0.20 and up. See previous version of the article for older images.
Computer vision modules (like ArUco markers and Optical Flow) require adjusting the camera focus and set up camera position and orientation relative to the drone body. Optional camera calibration can improve their quality of performance.
Focusing the camera lens
In order to focus the camera lens, do the following:
- Open the live camera stream in your browser using web_video_server.
- Rotate the lens to adjust the image. Make sure the objects that are 2-3 m from the camera are in focus.
| Unfocused image | Focused image |
|---|---|
 |
 |
Setting the camera position
Position and orientation of the main camera is set in the ~/catkin_ws/src/clover/clover/launch/main_camera.launch file:
<arg name="direction_z" default="down"/> <!-- direction the camera points: down, up -->
<arg name="direction_y" default="backward"/> <!-- direction the camera cable points: backward, forward -->
To set the orientation, define:
- direction the camera lens points
direction_z:downorup; - direction the camera cable points
direction_y:backwardorforward.
Examples
Camera faces downward, cable goes backward
<arg name="direction_z" default="down"/>
<arg name="direction_y" default="backward"/>
Camera faces downward, cable goes forward
<arg name="direction_z" default="down"/>
<arg name="direction_y" default="forward"/>
Camera faces upward, cable goes backward
<arg name="direction_z" default="up"/>
<arg name="direction_y" default="backward"/>
Camera faces upward, cable goes forward
<arg name="direction_z" default="up"/>
<arg name="direction_y" default="forward"/>
The
selfcheck.pyutility will describe your current camera setup in a human-readable fashion. Be sure to check whether this description corresponds to your actual camera position.
Custom camera position
It's possible to set arbitrary camera position and orientation. In order to do that uncomment node, marked as Template for custom camera orientation:
<!-- Template for custom camera orientation -->
<!-- Camera position and orientation are represented by base_link -> main_camera_optical transform -->
<!-- static_transform_publisher arguments: x y z yaw pitch roll frame_id child_frame_id -->
<node pkg="tf2_ros" type="static_transform_publisher" name="main_camera_frame" args="0.05 0 -0.07 -1.5707963 0 3.1415926 base_link main_camera_optical"/>
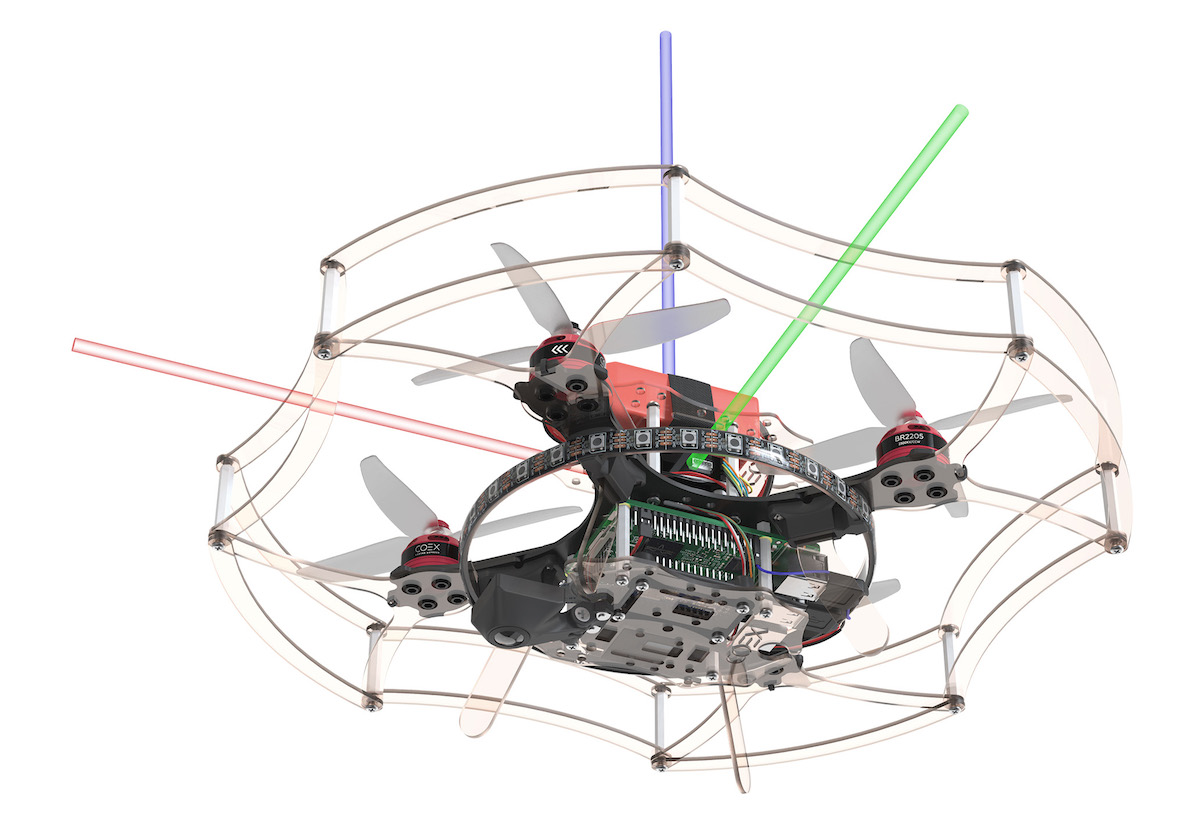
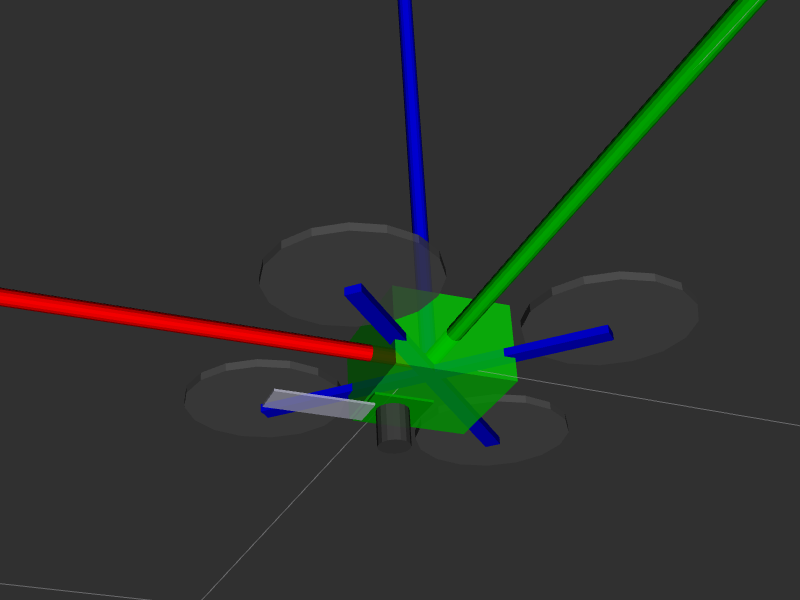
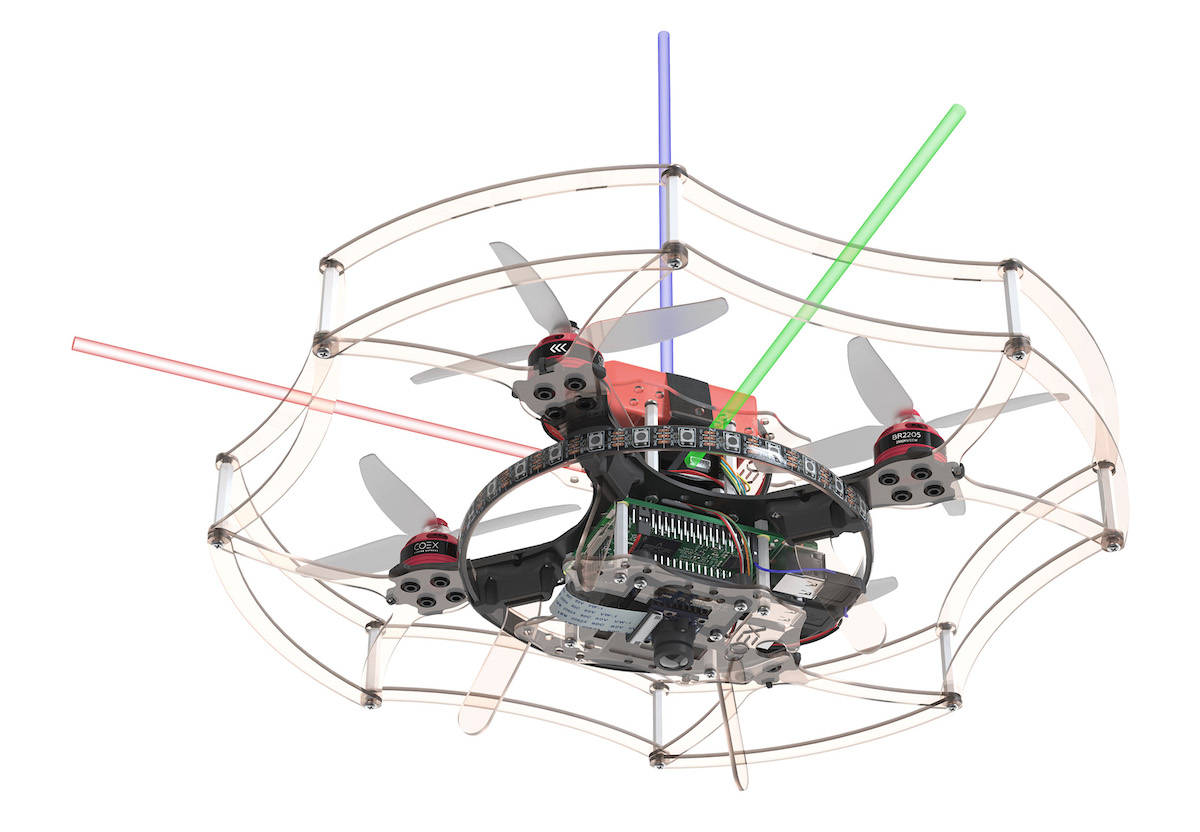
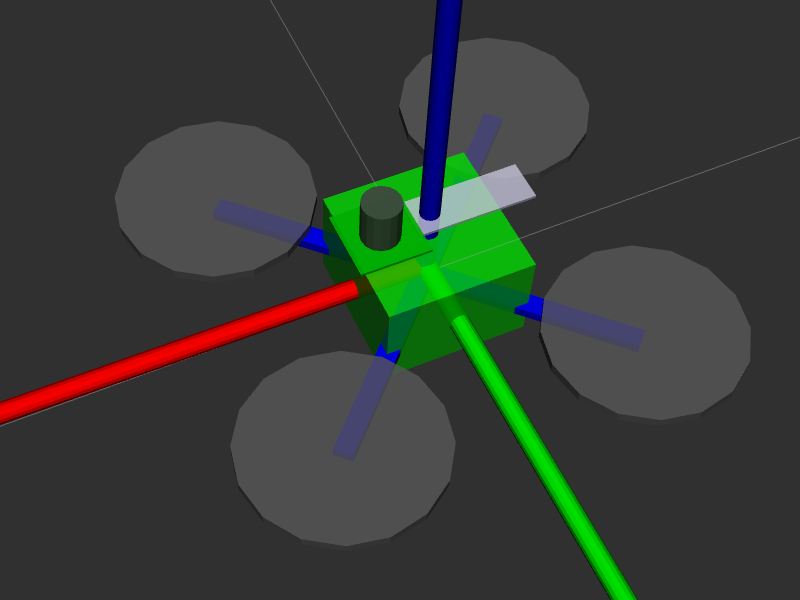
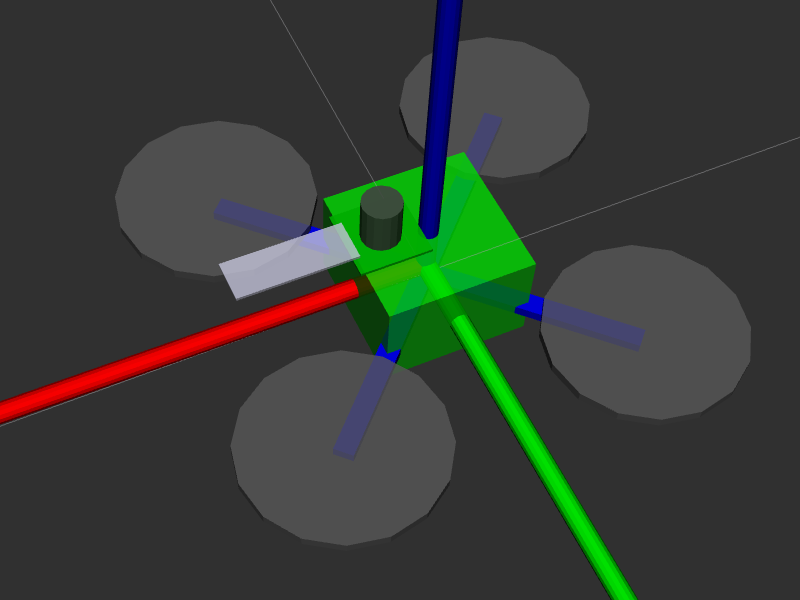
This line describes how the camera is positioned relative to the drone body. Technically, it creates a static transform between the base_link frame ( which corresponds to the flight controller housing) and the camera (main_camera_optical) in the following format:
shift_x shift_y shift_z yaw_angle pitch_angle roll_angle
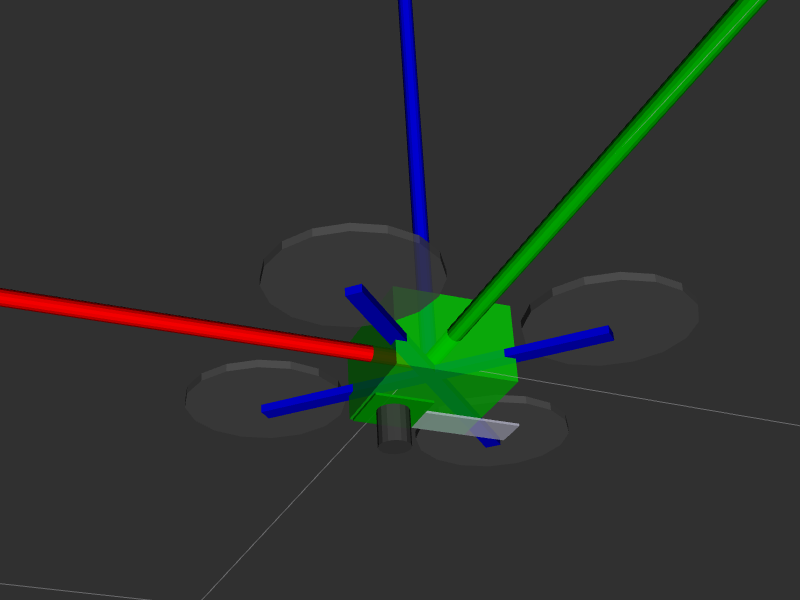
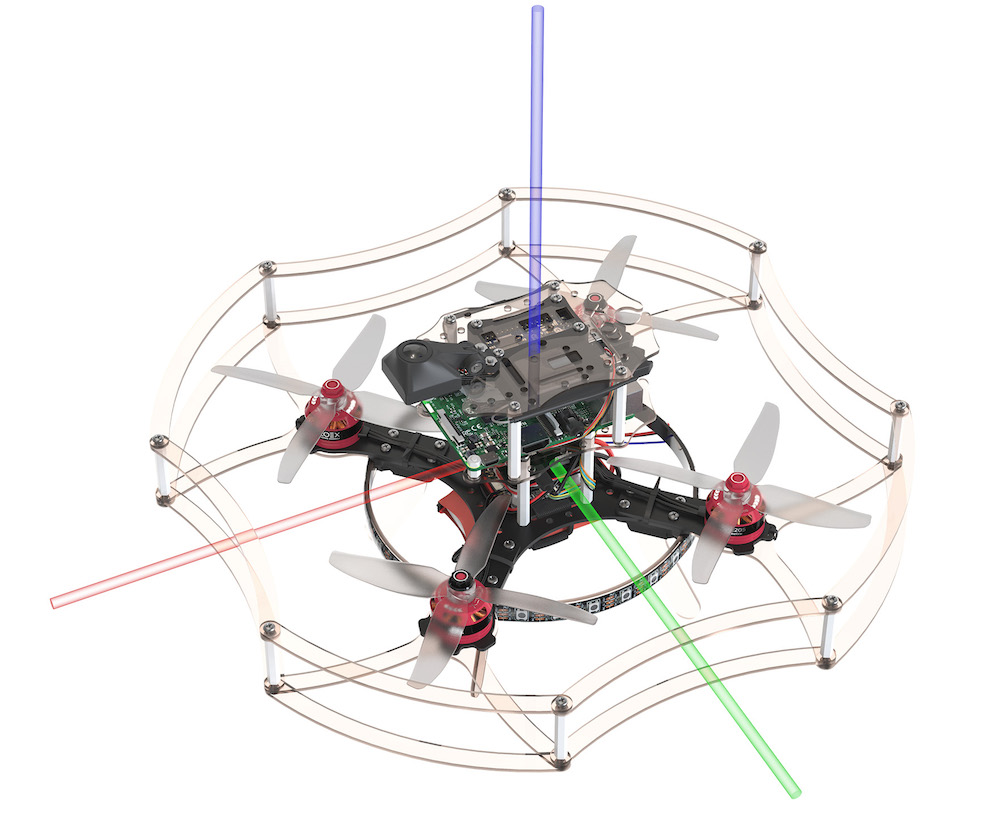
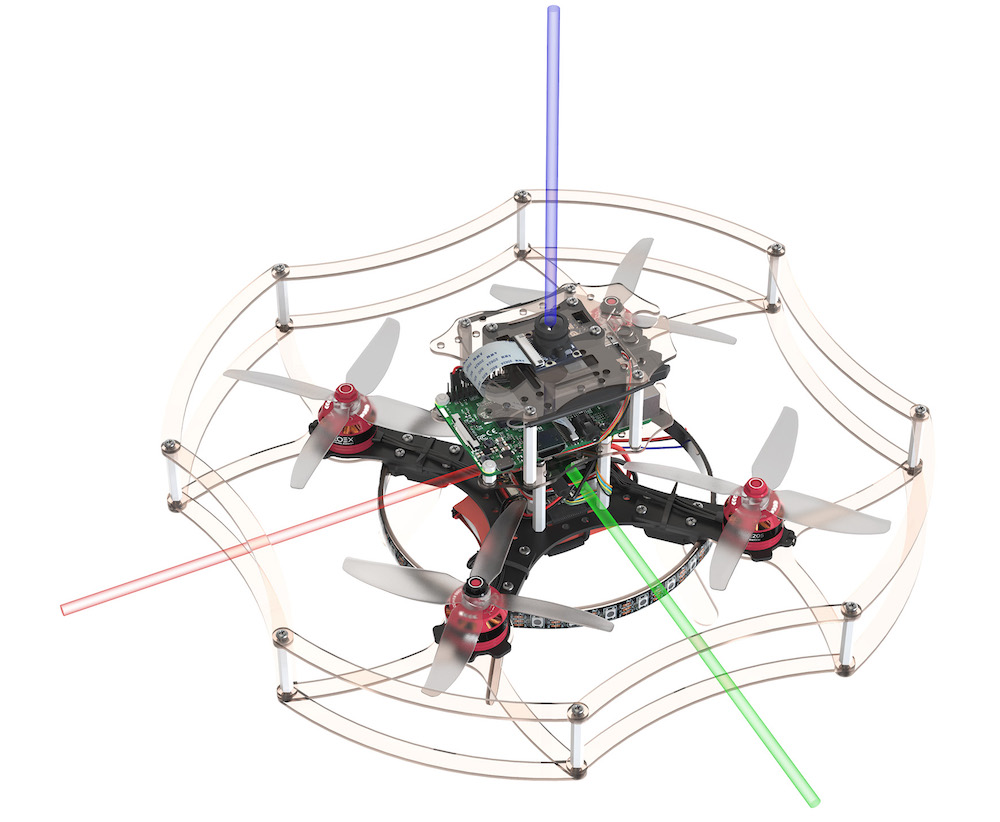
Camera frame (that is, frame of reference) is aligned as follows:
- x points to the right side of the image;
- y points to the bottom of the image;
- z points away from the camera matrix plane.
Shifts are set in meters, angles are in radians. You can check the transform for correctness using rviz.
Calibration
To improve the quality of computer vision related algorithms it's recommended to perform camera calibration, which is described in the appropriate article.