Using rviz and rqt
The rviz tool allows real-time visualization of all components of the robotic system —the system of coordinates, moving parts, sensors, camera images — on the 3D stage.
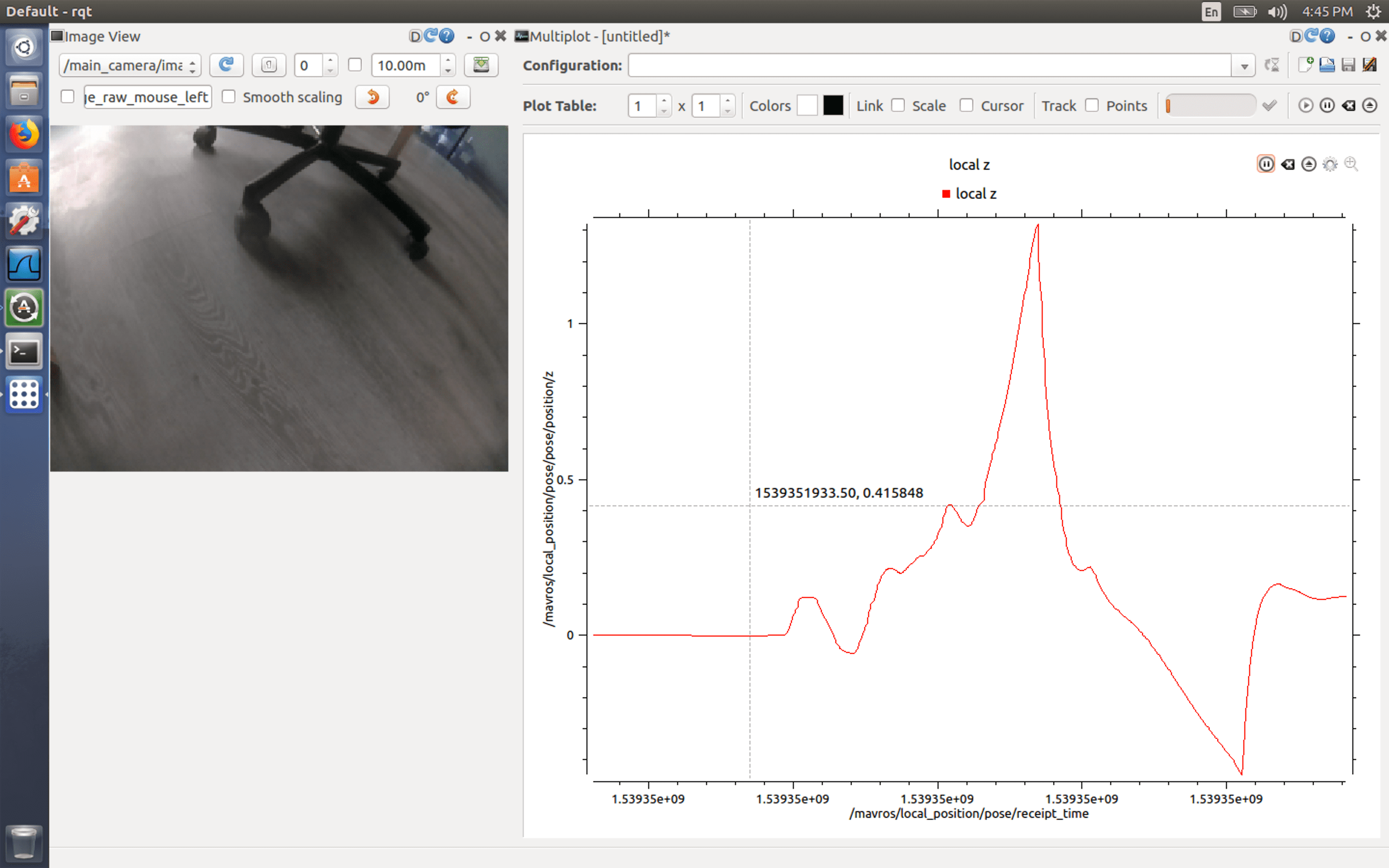
rqt is a set of GUI for analyzing and controlling ROS systems. For example, rqt_image_view allows viewing topics with images, rqt_multiplot allows plot charts by the values in topics, etc.
To use rviz and rqt, a PC running Ubuntu Linux (or a virtual machine such as Parallels Desktop Lite or VirtualBox) is required.
You can use the preconfigured virtual machine image with ROS and Clover toolkit.
Install package ros-noetic-desktop-full or ros-noetic-desktop using the installation documentation.
Start rviz
To start the Clover state visualization in real time, connect to it via Wi-Fi (clover-xxxx) and run rviz, specifying an appropriate ROS_MASTER_URI:
ROS_MASTER_URI=http://192.168.11.1:11311 rviz
In case of using a virtual machine for using rviz and other tools it might be necessary to change its network configuration to bridge mode (see details for VMware).
Using rviz
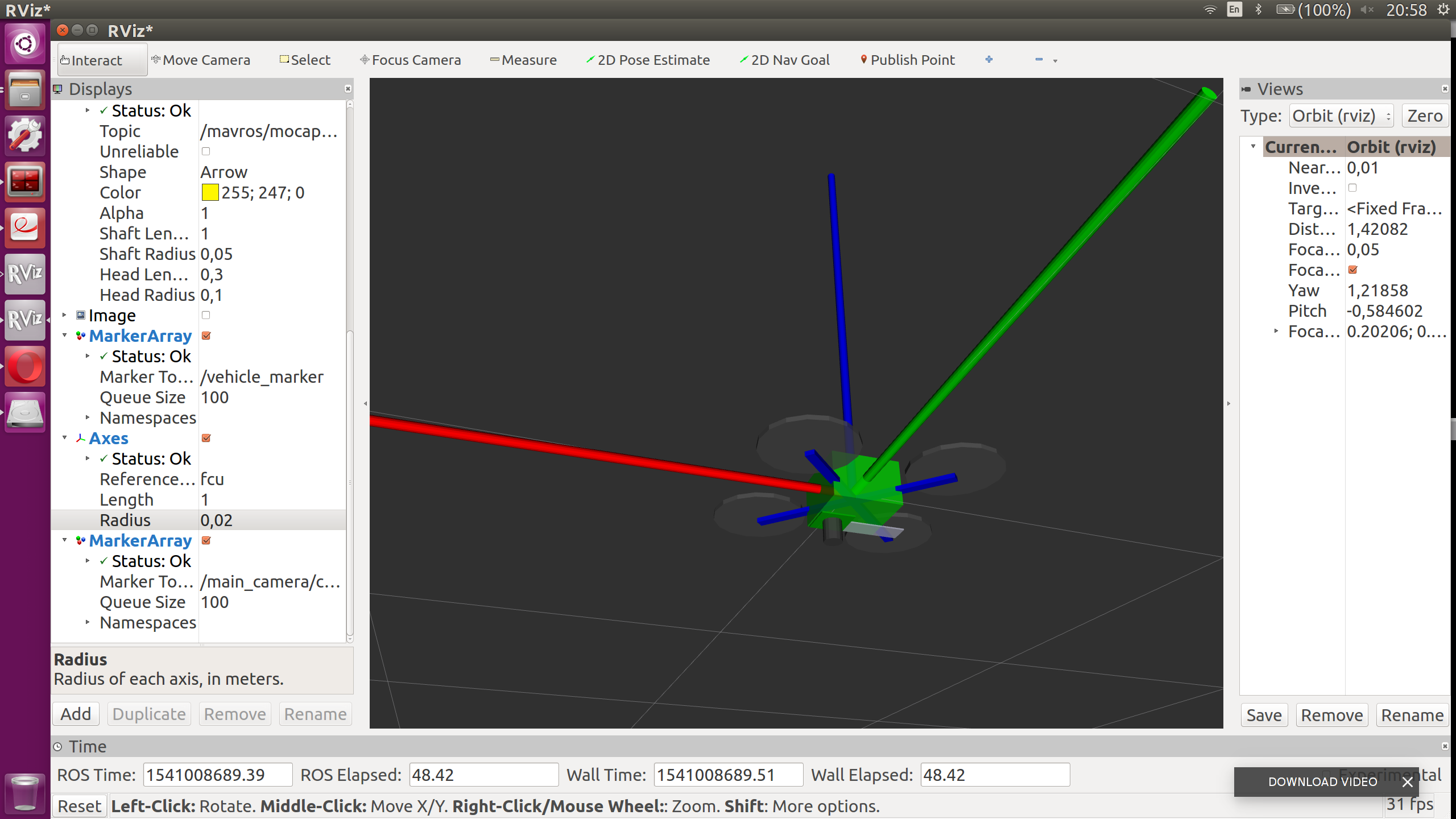
Visualization of the copter position
It is recommended to set the map frame as a reference frame. To visualize the copter, add visualization markers from topic /vehicle_markers. To visualize the camera of the copter, add visualization markers from topic /main_camera/camera_markers.
The result of copter and camera visualization is shown below:
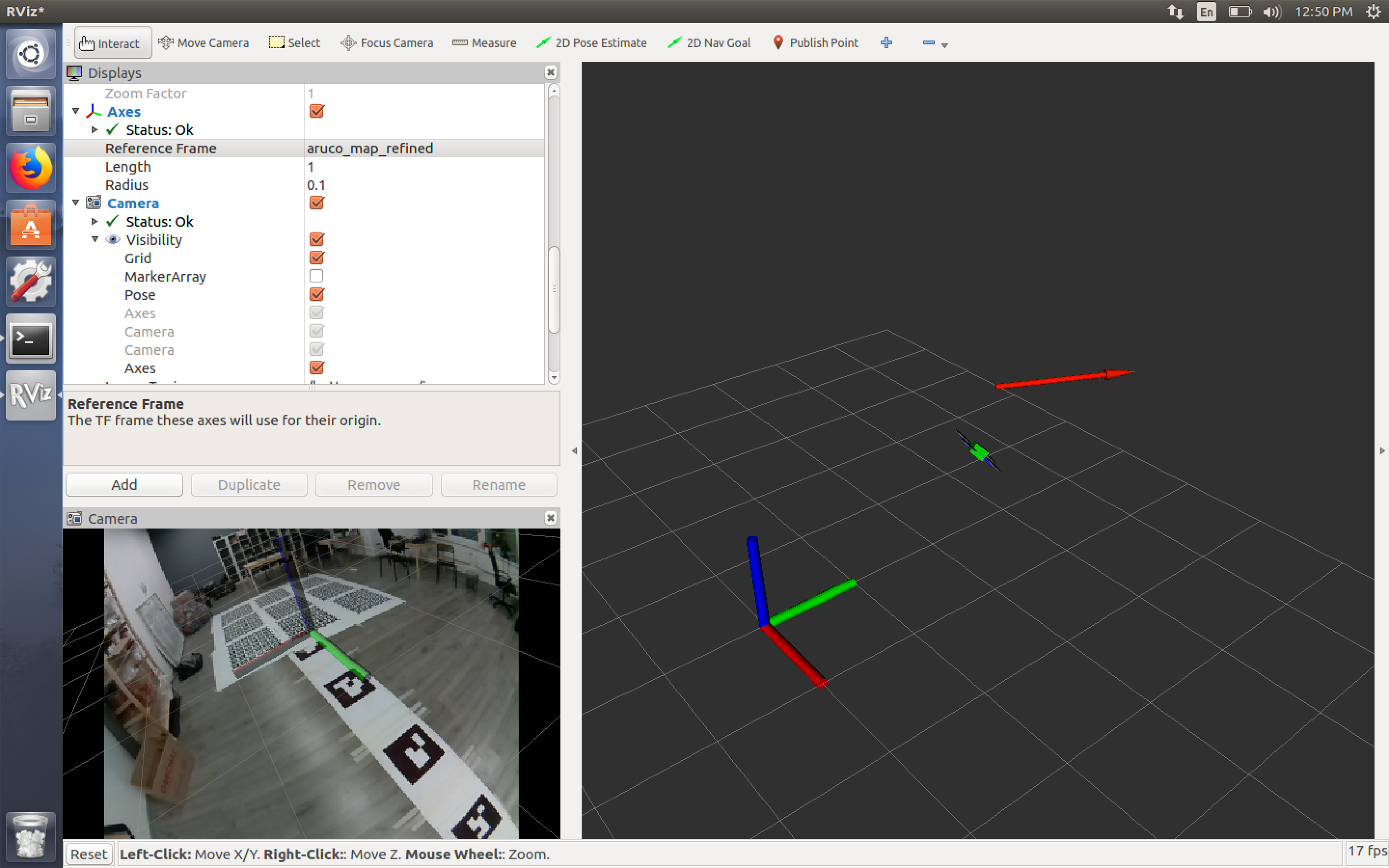
Visualization of the environment
You can view a picture with augmented reality from the topic of the main camera /main_camera/image_raw.
Axis or Grid configured to frame aruco_map will visualize the location on the map of ArUco marks.
jsk_rviz_plugins
It is also recommended to install additional useful plugins for rviz jsk_rviz_plugins. This kit allows visualizing topics like TwistStamped (velocity) CameraInfo, PolygonArray, and many more. To install, use command:
sudo apt-get install ros-melodic-jsk-visualization
Starting the rqt toolkit
To start rqt for monitoring Clover status, use command:
ROS_MASTER_URI=http://192.168.11.1:11311 rqt
An example of starting a specific plugin (rqt_image_view):
ROS_MASTER_URI=http://192.168.11.1:11311 rqt_image_view
Brief description of useful rqt plugins:
rqt_image_view– viewing images from topics likesensor_msgs/Image;rqt_multiplot– Building charts from the data from of arbitrary topics (installation:sudo apt-get install ros-melodic-rqt-multiplot);- Bag – working with Bag-files.