Simulation overview
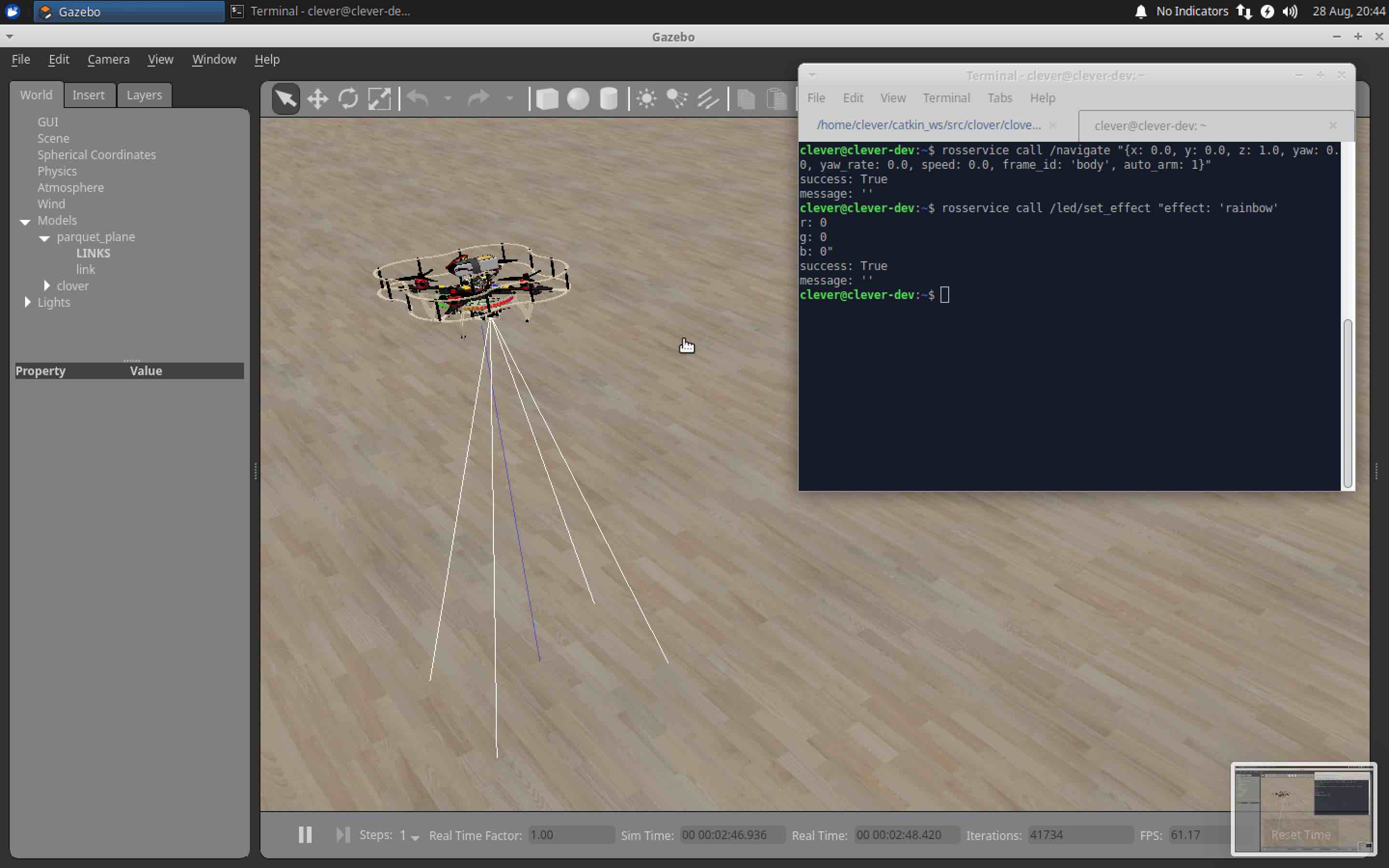
The Clover simulation environment allows users to run and debug their code within a simulator while using most of the features available on the real drone. The simulation utilizes PX4 SITL mode and uses the same ROS code as the real drone. Most hardware is simulated as well.
Features
Basic, user-installable environment includes:
- high-quality Clover 4 visual model;
- Gazebo plugins for Clover-specific hardware (e.g. LED strip);
- modification-friendly
xacrodrone descriptions; - sample models and worlds;
roslaunchfiles for quick simulation launching and configuration.
Additionally, a virtual machine image that mimics the real drone as closely as possible is provided with the following features:
- easy access to the simulation environment;
- Visual Studio Code editor, preconfigured to work with ROS packages;
- Monkey web server for web-based Clover plugins;
- always-running
roscoreservice; - ROS GUI tools (
rviz,rqt).
Architecture
The simulation environment is based on the following components:
- Gazebo, a state-of-the-art robotics simulator;
- PX4, specifically its SITL (software-in-the-loop) components;
sitl_gazebopackage containing Gazebo plugins for PX4;- ROS packages and Gazebo plugins.
Video
Short video review of the simulator: